4. Анализ динамических характеристик СУЭП
4.1 Полная структурная схема системы управления
Вид полной структурной схемы системы управления электроприводом представлен на рисунке 4.1.
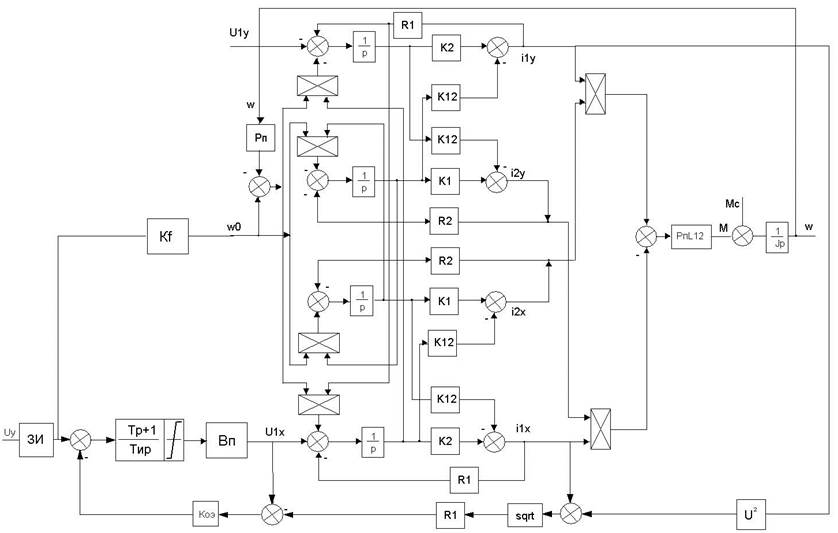
Рис. 4.1. Полная структурная схема системы управления ЭП.
В регуляторе ЭДС используется ограничение выходного сигнала на уровне ± 5 В. Коэффициент усиления в канале регулирования напряжения рассчитывался из условия достижения величины 220 В, при напряжении задания 5 В. В канале регулирования скорости коэффициент усиления рассчитывается для напряжения задания 10 В, что соответсвует скорости вращения 2wн.
4.2 Статические характеристики системы, рабочие режимы СУЭП на статических характеристиках
Статические характеристики электропривода представляют собой зависимость скорости двигателя от возмущающего воздействия (статического момента) при постоянном задающем сигнале. Так как система астатическая, у регуляторов напряжения в знаменателе передаточной функции присутствует свободная составляющая (1), то статические характеристики будут иметь вид прямых линий, значения которых будут определятся выражением.
 ,
(6.2)
,
(6.2)
где Uf – задающий сигнал, В;
p – число пар полюсов электродвигателя, p=3.
Рассчитаем статические характеристики. И занесем в таблицу 4.1.
Таблица 4.1
|
|
|
|
|
10 |
209,3 |
207 |
|
9 |
188,4 |
188,4 |
|
8 |
167,47 |
167,47 |
|
7 |
146,53 |
146,53 |
|
6 |
125,6 |
125,6 |
|
5 |
104,7 |
104,7 |
|
4 |
83,73 |
83,73 |
|
3 |
68,8 |
62,8 |
|
2 |
41,87 |
41,87 |
Статические характеристики представлены на рисунке 4.2
 |
![]()
|
|
Рис. 4.2. Статические характеристики.
4.3 Имитационная модель СУЭП
Структурная схема системы управления скоростью трехфазного асинхронного двигателя с короткозамкнутым ротором в системе моделирования MATLAB представлена на рис.4.3
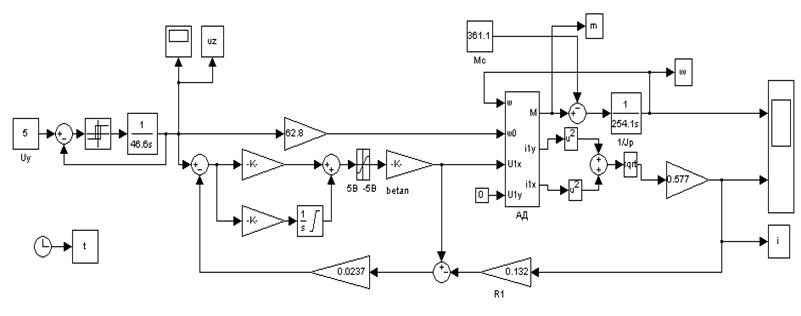
Рис. 4.3. Схема моделирования системы скалярного частотного управления.
Структурная схема модели асинхронного двигателя в осях XY представлена на рисунке 4.4.
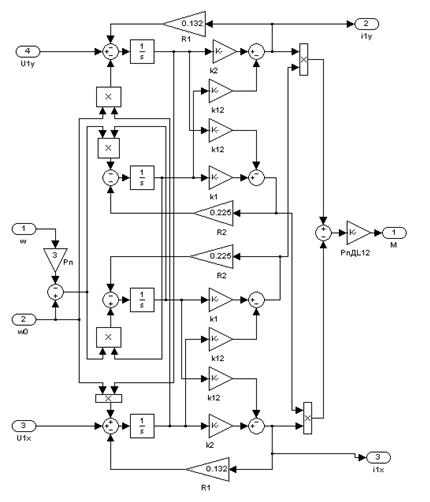
Рис. 4.4. Структурная схема модели АД в осях XY.
4.4 Моделирование основных режимов СУЭП
Произведём моделирование основных режимов работы электропривода: 1. разгон до номинальной скорости;
2. разгон до максимальной скорости;
3. разгон на пониженную скорость;
При этом нас интересует скорость, ток и момент. Моделирование будем производить под нагрузкой (Мс=361,1 Н*м) для скоростей, не превышающих wн. Для скорости 2wн разгон до номинальной скорости будем производить для Мс=0 Н*м.
1. Разгон до номинальной скорости. Вид кривой изменения скорости во времени представлен на рисунке 4.5, момента во времени на рисунке 4.6, тока во времени на рисунке 4.7.
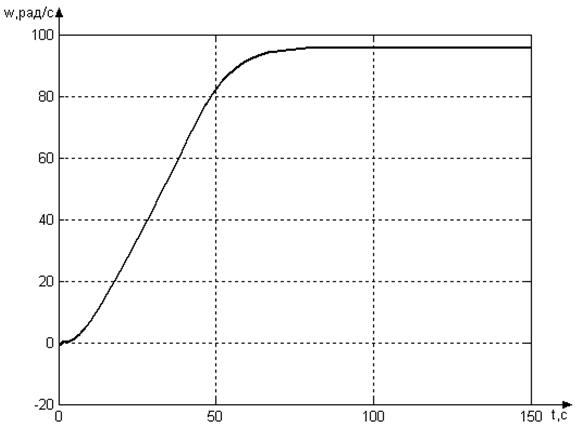
Рис. 4.5. Зависимость w(t).
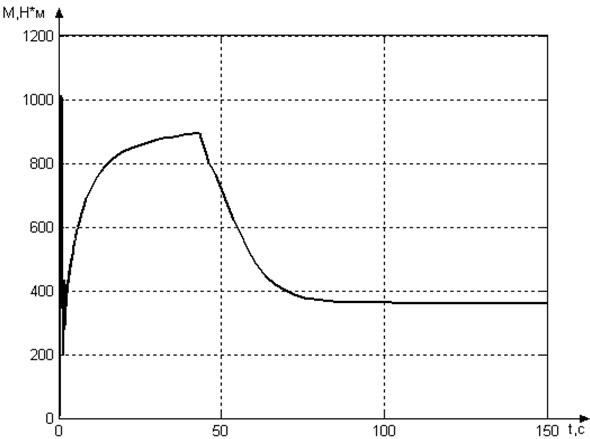
Рис. 4.6. Зависимость M(t).
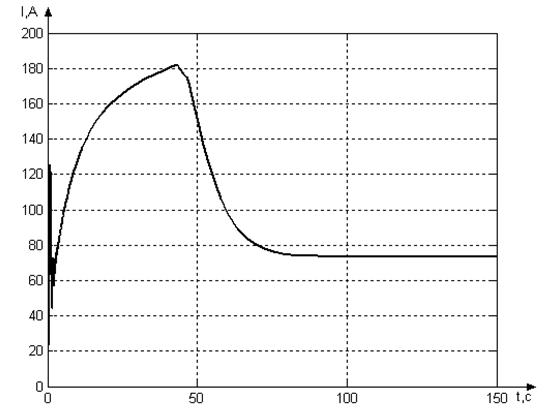
Рис. 4.7. Зависимость I(t).
На рис.4.8 представлена зависимость I(t) в начале разгона.
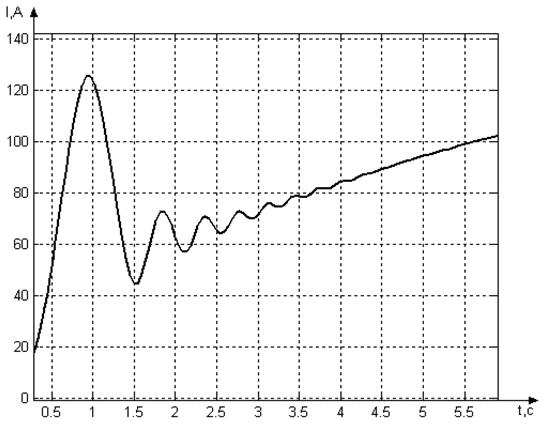
Рис. 4.8. Зависимость I(t) в начале переходного процесса.
На рисунке 4.9 приведен вид кривой с задатчика интенсивности, на рисунке 4.10 приведен вид кривой после регулятора ЭДС.
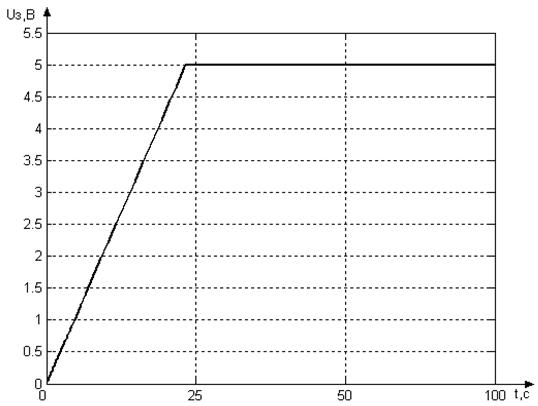
Рис. 4.9. Зависимость Uз(t).
2. Разгон до максимальной скорости. Вид кривой изменения скорости во времени представлен на рисунке 4.10, момента во времени на рисунке 4.11, тока во времени на рисунке 4.12.
|
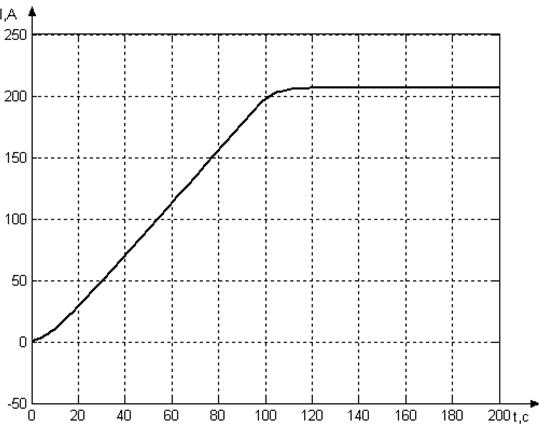
Рис. 4.10. Зависимость w(t).
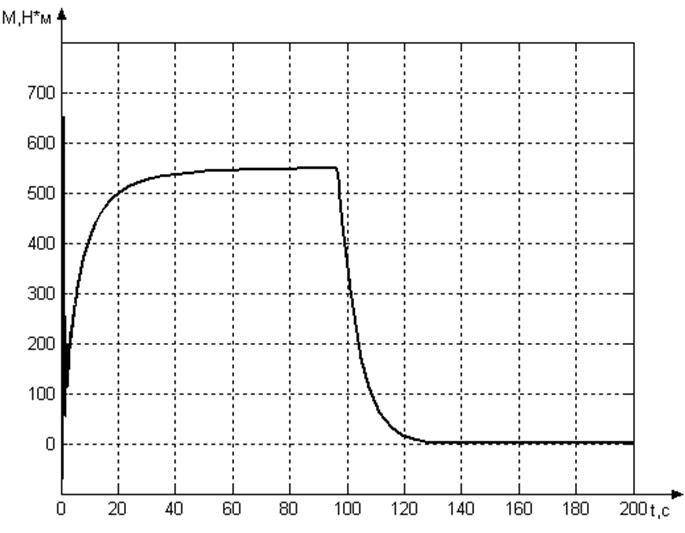
Рис. 4.11. Зависимость M(t).
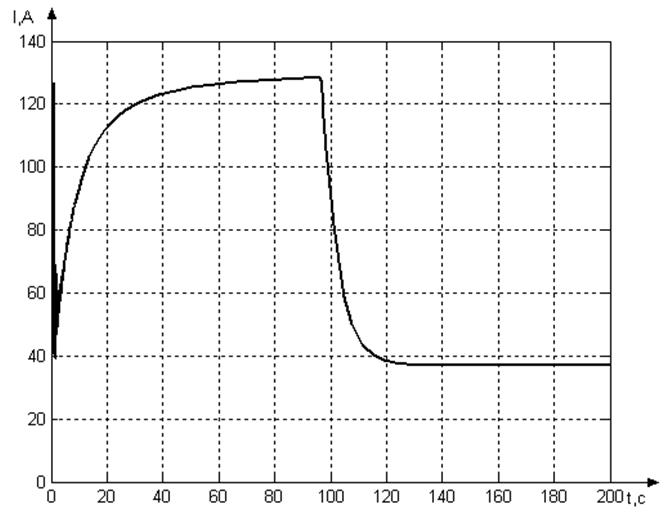
Рис. 4.12. Зависимость I(t).
Задание скорости Uз(t) представлено на рисунке 4.13.
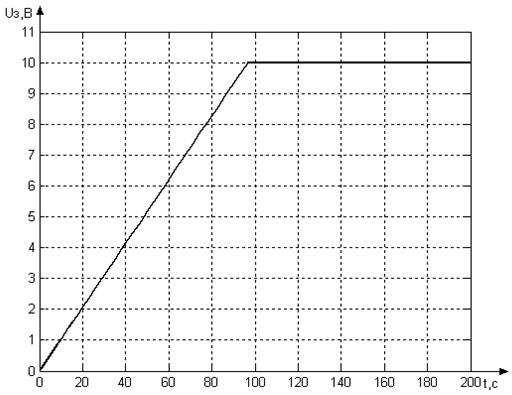
Рис. 4.13. Зависимость Uз(t).
3. Разгон на пониженную скорость. Вид кривой изменения скорости во времени представлен на рисунке 4.14, момента во времени на рисунке 4.15, тока во времени на рисунке 4.16. Задание скорости Uз(t) представлено на рисунке 4.17.
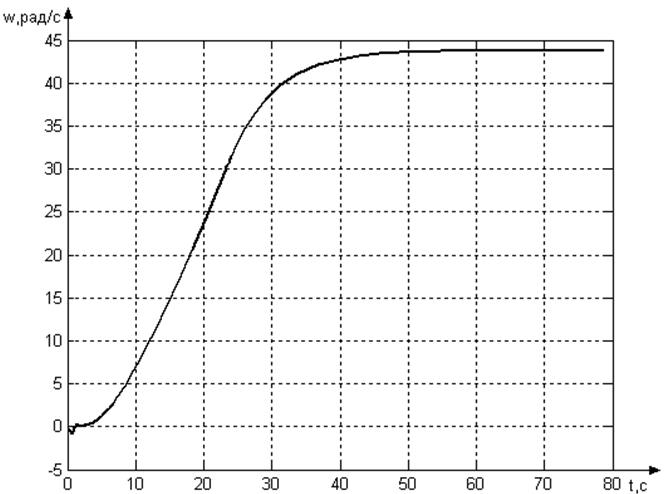
Рис. 4.14. Зависимость w(t).
|
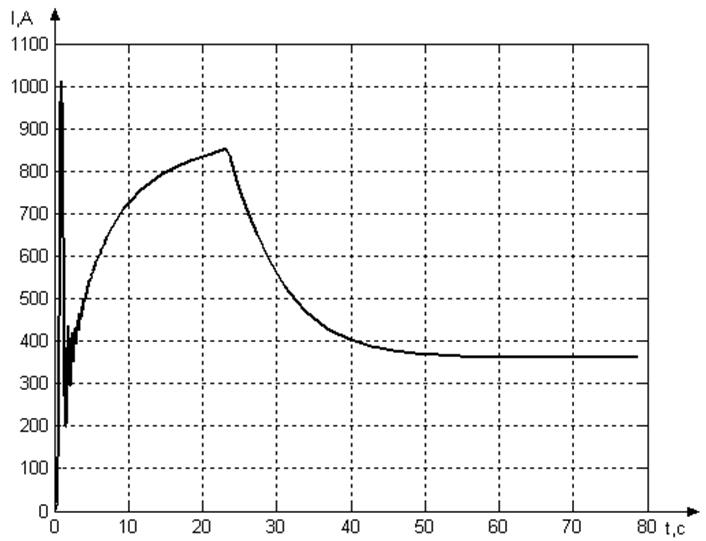
Рис. 4.15. Зависимость M(t).
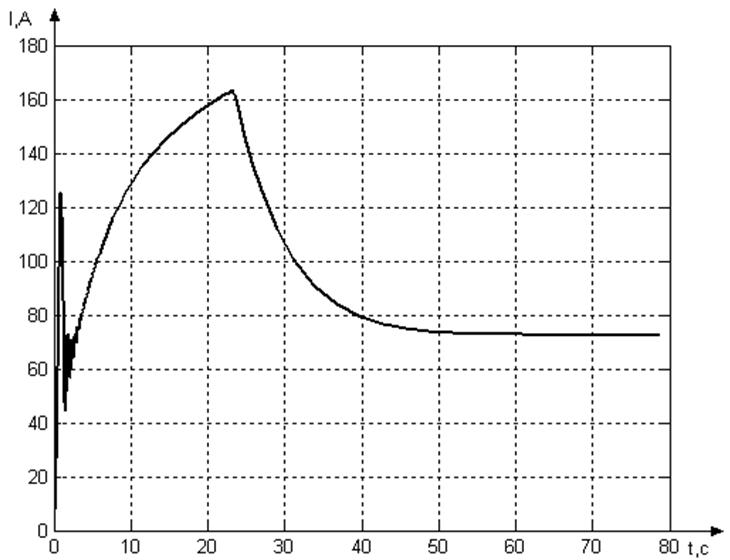
Рис. 4.16. Зависимость I(t).
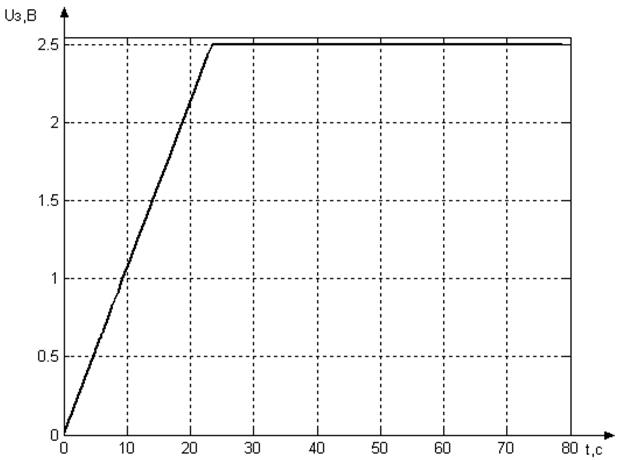
Рис. 4.17. Зависимость Uз(t).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.