















Министерство образования Республики Беларусь
Белорусский Государственный Технологический Университет
КУРСОВОЙ ПРОЕКТ
по дисциплине: «Электронные устройства автоматики»
на тему: «Проектирование системы стабилизации частоты вращения двигателя постотянного тока»
Исполнитель: Мельничёнок Е.А.
Руководитель: Оробей И.О.
Минск 2010г
СОДЕРЖАНИЕ
ВВЕДЕНИЕ. 4
1.. РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ.. 5
2.. РАСЧЕТ И СИНТЕЗ ЭЛЕМЕНТОВ ЭЛЕКТРОННОГО УСТРОЙСТВА СТРУКТУРНОЙ СХЕМЫ.. 7
3.. РАСЧЕТ КОНТУРА РЕГУЛИРОВАНИЯ.. 10
4.. РАЗРАБОТКА СХЕМЫ ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ.. 12
4.1 Разработка схемы ПИ–регулятора. 12
4.2 Разработка схемы исполнительного механизма. 13
4.3 Разработка схемы подключения усилителя. 14
4.4 Разработка схемы подключения триггера Шмидта. 15
4.5 Разработка схемы задатчика интенсивности (ЗИ) 16
4.6 Разработка схемы силовых цепей. 17
5.. РАСЧЕТ ПЕРЕХОДНОГО ПРОЦЕССА В КОНТУРЕ РЕГУЛИРОВАНИЯ.. 18
6.. РАЗРАБОТКА УСТРОЙСТВА ИНДИКАЦИИ.. 19
ЗАКЛЮЧЕНИЕ. 21
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ.. 22
ВВЕДЕНИЕ
Современное развитие электронной техники характеризуется значительным усложнением требований решаемых задач, что приводит к резкому увеличению числа элементов радиоэлектронной аппаратуры. При ограниченных показателях надежности элементов резко снижается надежность всей системы и увеличивается масса, объем и потребляемая энергия. В этих условиях исключительно большое значение приобретают проблемы повышения надежности и комплексной миниатюризации радиоэлектронной аппаратуры.
В результате микроэлектроника приводит не только к изменению элементной базы, выражающемся в том, что на смену дискретным элементам приходит новые интегральные детали – интегральные схемы. Она затрагивает более глубокие аспекты разработки электронной аппаратуры, и требует изменения традиционных подходов к проектированию сложных систем.
Принципиально новые пути решения указанных проблем обеспечивает микроэлектроника как исторически обусловленный этап развития электроники и одно из ее основных направлений.
Автоматизация технологических процессов на основе современных средств автоматизации и вычислительной техники составляет одно из основных направлений научно-технического прогресса во всех отраслях народного хозяйства. Подходы к созданию средств измерений, контроля и управления оборудованием в технологическом процессе характеризуются от решения относительно простых задач автоматизации к разработке на микроэлектронной элементной базе приборов с программным управлением, которые обеспечивают автоматический режим работы как автономно, так и в сложных системах контроля и управления при большом объеме обрабатываемой информации.
1. РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ
Объектом управления является микроэлектродвигатель с возбуждение от постоянных магнитов типа ДПМ-20-Н1, Н2-13.
Для осуществления регулирования частоты вращения ДПТ в данном случае применяется ПИ-регулятор.
В качестве исполнительного механизма используем комплементарную пару транзисторов.
Первичный преобразователь частоты вращения двигателя выполнен на оптопаре, рабочий зазор которой перекрывается диском, жестко закрепленном на валу.
В качестве элемента, преобразующего частотно-моделированный сигнал оптопары, используем усилитель.
Из-за механических проблем и присутствия шума после усилителя оптопары необходимо установить триггер Шмидта, с шириной гистерезиса (0,5+0,001N)В, где N – число прорезей (N=90), тогда ширина гистерезиса будет равна 0,59В.
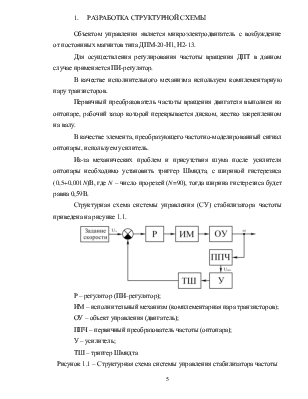
Структурная схема системы управления (СУ) стабилизатора частоты приведена на рисунке 1.1.
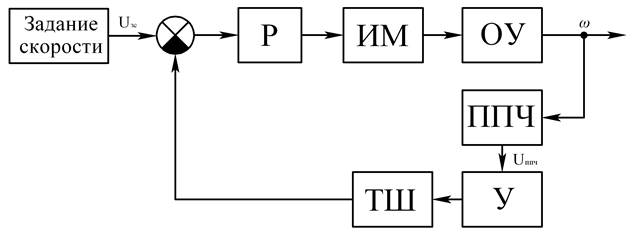
Р – регулятор (ПИ–регулятор);
ИМ – исполнительный механизм (комплементарная пара транзисторов);
ОУ – объект управления (двигатель);
ППЧ – первичный преобразователь частоты (оптопара);
У – усилитель;
ТШ – триггер Шмидта
Рисунок 1.1 – Структурная схема системы управления стабилизатора частоты
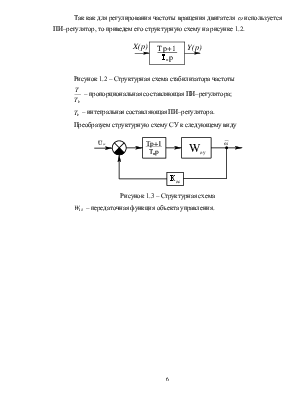
Так как для регулирования частоты вращения двигателя ω используется ПИ–регулятор, то приведем его структурную схему на рисунке 1.2.
Рисунок 1.2 – Структурная схема стабилизатора частоты
![]() –
пропорциональная составляющая ПИ–регулятора;
–
пропорциональная составляющая ПИ–регулятора;
![]() –
интегральная составляющая ПИ–регулятора.
–
интегральная составляющая ПИ–регулятора.
Преобразуем структурную схему СУ к следующему виду
Рисунок 1.3 – Структурная схема
![]() –
передаточная функция объекта управления.
–
передаточная функция объекта управления.
2. РАСЧЕТ И СИНТЕЗ ЭЛЕМЕНТОВ ЭЛЕКТРОННОГО УСТРОЙСТВА СТРУКТУРНОЙ СХЕМЫ
Запишем передаточную функцию объекта управления
 (2.1)
(2.1)
где ![]() – электромагнитная постоянная времени,
– электромагнитная постоянная времени,  ;
;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.