Примем R2 = 1 кОм, тогда R1 = 120 Ом
Таким образом, окончательно выбираем
DA5- К155УД3; R1- МЛТ-0,125-1кОм±10%;R2- МЛТ-2,5-120Ом±10%
4.5 Разработка схемы задатчика интенсивности (ЗИ)
Схема ЗИ состоит из двух звеньев последовательно соединенных пропорционального и интегрального звеньев.
Рисунок 4.8 – Исполнение задатчика интенсивности
Для пропорционального звена можно записать следующее выражеие
Т.е.  , где
, где ![]() , тогда
примем R2 =1кОм, следовательно, R3 = 667 Ом
, тогда
примем R2 =1кОм, следовательно, R3 = 667 Ом
Для интегрального звена можно записать следующее выражеие
![]()
Примем С1 =1мкФ,
тогда 
Таким образом, окончательно выбираем
DA2, DA3- К155УД3;
R1- МЛТ-1-75кОм±10%;
R2- МЛТ-0,125-1кОм±10%
R3- МЛТ-2-680Ом±10%
С1- ![]()
4.6 Разработка схемы силовых цепей
Для подачи постоянного напряжения на двигатель воспользуемся схемой мостового неуправляемого выпрямителя, который подключен через согласующий трансформатор к сети 220В. Схема исполнения силовой цепи показана на рисунке 4.9.
Рисунок 4.9 – Исполнение силовой цепи
Выбор неуправляемого
выпрямителя произведем по среднему току, протекающему через вентили, т.е.  , т.е. выбираем диодный мост типа B4S 0,5А 250V
SMD.
, т.е. выбираем диодный мост типа B4S 0,5А 250V
SMD.
В качестве трансформатора TV1 применяем трансфоорматор типа ОСО 220/12 В.
Автоматический выключатель
QF1 осуществляем защиту силовой цепи от
протекания токов короткого замыкания. Выбираем автомат по пусковому току исходя
из выражения ![]() , т.е. выбираем QF1 типа YA-0802X, 1А 250VAC.
, т.е. выбираем QF1 типа YA-0802X, 1А 250VAC.
5. РАСЧЕТ ПЕРЕХОДНОГО ПРОЦЕССА В КОНТУРЕ РЕГУЛИРОВАНИЯ
Расчет переходного процесса в контуре регулирования произведем с помощью программного приложения Simulink пакета MTALAB.
Для моделирования переходного процесса построим структурную схему в Simulink с рассчитанными ранее параметрами.
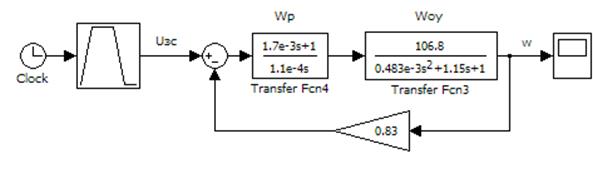
Рисунок 5.1 – Структурная схема контура регулирования в среде MATLAB
В ходе моделирования были получены следующие характеристики.
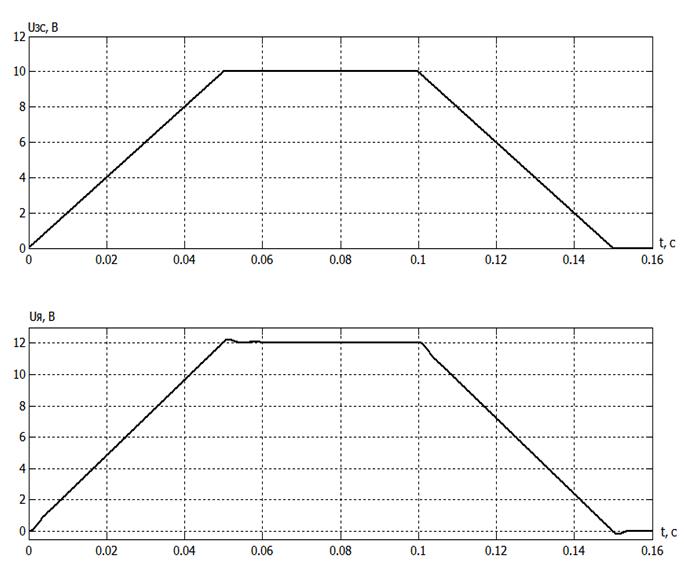
Рисунок 5.2 – Временные диаграммы работы
Как видно из временных диаграмм напряжения на якоре двигателя с небольшой погрешностью повторяет напряжение задания, т.е. можно сказать, что расчет контура регулирования выполнен верно.
6. РАЗРАБОТКА УСТРОЙСТВА ИНДИКАЦИИ
Информацию будем отображать на симметричных матрицах АЛС 320. Счетчик К176ИЕ3 имеет встроенный дешифратор. Цифры формируются следующим образом: при поступлении с оптопары последовательно идущих прямоугольных импульсов счетчик их суммирует и выдает сигнал кода на дешифратор, преобразованный этот код в набор из 7 сигналов, подаваемых на матрицу. Причем так как матрица имеет общий катод, то для того, чтобы нужный светодиод светился, на его вход подается высокий потенциал.
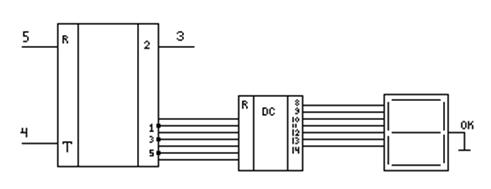
Рисунок 6.1 – Исполнение устройства индикации
Для того, чтобы информация обновлялась каждую секунду на 4 выход микросхемы К176ИЕ3 подаем с выхода генератора тактовых импульсов импульсы с частотой f.
Так как диск имеет 90
прорезей и рабочий зазор перекрывается диском 90 раз, и учитывая что ротор
двигателя делает 270000об/сек, то общее количество импульсов  , т.е. максимальная частота будет равна
, т.е. максимальная частота будет равна
![]()
где z-число прорезей.

В итоге получаем, что
генератор импульсов должен вырабатывать импульсы с частотой ![]() . В качестве генератора импульсов
используется генератор на основе кварцевого резонатора, схема которого
изображена на рисунке 6.2.
. В качестве генератора импульсов
используется генератор на основе кварцевого резонатора, схема которого
изображена на рисунке 6.2.
Рисунок 6.2 – Схема кварцевого резонатора
Кварцевый резонатор
вырабатывает импульсы с периодом равным ![]() . В этой
схеме сопротивление
. В этой
схеме сопротивление ![]() характеризует затухание
механических колебаний, а
характеризует затухание
механических колебаний, а ![]() определяется емкостью
резонатора и сопротивлением соединительных проводов. Основываясь на практических
данных параметры
определяется емкостью
резонатора и сопротивлением соединительных проводов. Основываясь на практических
данных параметры ![]() составляют 800 Ом и 40пФ.
составляют 800 Ом и 40пФ.
Примем С1 =1мкФ,
тогда 
Таким образом, окончательно выбираем
DD1- К155ЛА3;
С1- ![]()
R1- МЛТ-2-120Ом±10%
С2- ![]()
R2- МЛТ-0,125-1кОм±10%
ЗАКЛЮЧЕНИЕ
В результате выполнения курсовго проекта разработано электронное устройство, выполняющее стабилизацию частоты вращения, система управления которого реализована на аналоговых и интегральных микросхемах. Интегральные микросхемы обладают высокой надежностью, малым потреблением энергии и обеспечивают выполнение заданных функций, системы управления.
Произведен синтез элементов электрической принципиальной схемы и выполнили расчет. В результате проведенных расчетов построена полная принципиальная схема электронного.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Оробей И.О., Гринюк Д.А. Электротехника, основы электроники и электрооборудование химических производств
2. В.И. Галкин «Промышленная электроника». Минск «Высшая школа», 1989 г.
3. Д. Грейсмер. «Радиоэлектронные схемы на ИС типа 555» Москва «Высшая школа», 1988 г.
4. Л.М. Поноцкий «Автоматизация химических производств» Химия 1982 г.
5. Электротехнический справочник.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.