![]() –
индуктивность электродвигателя,
–
индуктивность электродвигателя,  ;
;
![]() –
электромеханическая постоянная времени,
–
электромеханическая постоянная времени,  ;
;
![]() –
конструктивная постоянная двигателя,
–
конструктивная постоянная двигателя,  ;
;
![]() –
конструктивная постоянная двигателя,
–
конструктивная постоянная двигателя,  ;
;
В соответствии с заданием на курсовой проект для двигателя типа: ДПМ-20-Н1, Н2-13 запишем исходные данные:
Напряжение питания Uном =12В
Мощность двигателя Рном =0,69 Вт
Номинальная частота вращения nном =4500 об/мин
Номинальный момент на валу Mном =0,147 мН∙м
Пусковой момент на валу Мп =3,92 мН∙м
Потребляемый ток Iном =0,28 A
Пусковой ток Iп =0,8 А
КПД двигателя ηном =0,21
Исполнение двигателя приведено на рисунке 2.1.
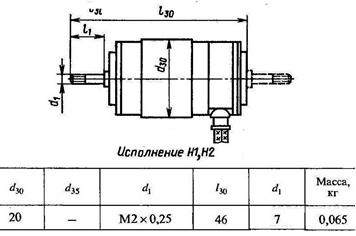
Рисунок 2.1 – Исполнение двигателя типа ДПМ-20-Н1, Н2-13
Рассчитаем параметры передаточной функции
Определим угловую скорость вращения двигателя:

Определим сопротивление якоря двигателя:

Определим индуктивность якоря двигателя:

Определим электромагнитную постоянную времени двигателя:
Определим конструктивные
постоянные двигателя ![]() и
и ![]() :
:


Определим момент инерции двигателя, который исходя из [1] равен:
 , где
, где ![]() – масса двигателя [2],
– масса двигателя [2], ![]() ;
;
![]() –
типоразмер двигателя [2],
–
типоразмер двигателя [2], ![]()
![]() –
радиус двигателя,
–
радиус двигателя, 

Определим электромеханическую постоянную времени двигателя:

Таким образом передаточная функция объекта управления будет иметь вид:

3. РАСЧЕТ КОНТУРА РЕГУЛИРОВАНИЯ
Структурная схема имеет следующий вид
Рисунок 3.1 – Структурная схема системы
На основании структурной схемы можно записать следующее выражение

Передаточная функция данной системы будет иметь вид:

Прировняем коэффициенты при одинаковых степенях p
Согласно теореме Виета характеристическое уравнение будет иметь вид:

Зададимся распределением корней характеристического уравнения по Баттерворту:
где п-порядковый номер характеристического уравнения системы;
i-порядковый номер полюса;
Н-модуль полюса.
|
|
![]()
![]()
![]()
![]()
С учетом подстановки корней получим:
![]()
Приравняем коэффициенты при одинаковых степенях р:
В итоге получаем, что передаточная функция ПИ–регулятора будет иметь вид
4. РАЗРАБОТКА СХЕМЫ ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ
4.1 Разработка схемы ПИ–регулятора
Схема ПИ–регулятора состоит из 3-х звеньев: двух параллельно соединенных пропорционального и интегрального звеньев и сумматора, суммирующего выходные сигналы.
Пропорциональное звено
Рисунок 4.1 – Исполнение пропорционального звена
Для пропорционального звена можно записать следующее выражеие
Т.е.  , тогда примем R1 =1кОм, тогда R2 = 15,5 кОм
, тогда примем R1 =1кОм, тогда R2 = 15,5 кОм
Таким образом, окончательно выбираем
DA1- К155УД3;
R1- МЛТ-0,125-1кОм±10%;
R2- МЛТ-0,125-18кОм±10%
Интегральное звено
Рисунок 4.2 – Исполнение интегрального звена
Для интегрального звена можно записать следующее выражеие
![]()
Примем С1 =1мкФ,
тогда 
Таким образом, окончательно выбираем
DA2- К155УД3;
С1- ![]()
R1- МЛТ-2-120Ом±10%
Суммирующее звено
Рисунок 4.3 – Исполнение суммирующего звена
Для суммирующего звена можно записать следующее выражеие
Для устранения искажений
величин входных напряжений сумматора, коэффициенты при ![]() ,
т.е.
,
т.е.  , тогда примем R1 = R2 = R3=1кОм.
, тогда примем R1 = R2 = R3=1кОм.
Таким образом, окончательно выбираем
DA3- К155УД3;
R1- МЛТ-0,125-1кОм±10%;
R2- МЛТ-0,125-1кОм±10%;
R3- МЛТ-0,125-1кОм±10%
4.2 Разработка схемы исполнительного механизма
Исходя из задания на курсовую работу ИМ необходимо реализовать используя комплементарную пару транзисторов, включенную в цепь якоря двигателя постоянного тока. Сигнал с ПИ–регулятора подается на базу комплементарной пары. В зависимости от величин сигнала, изменяется ток, проходящий в цепи якоря через коллектор–эмиттер.
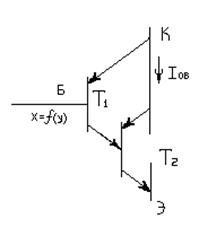
Рисунок 4.4 – Схема комплементарной пары транзисторов
Комплементарная пара транзисторов должна выдерживать пусковой ток двигателя, поэтому выбираем её по пусковому току электродвигателя, который равен 0,8 А.
Таким образом, окончательно выбираем комплементарную пару транзисторов типа n-p-n типа 2N6283 с пусковым током равным 1,5А. Схема подключения изображенная на рисунке 4.5.
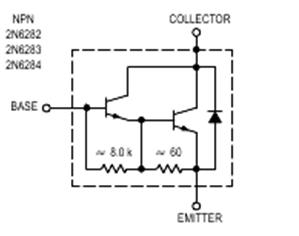
Рисунок 4.5 – Схема подключения комплементарной пары транзисторов
4.3 Разработка схемы подключения усилителя
Рисунок 4.6 – Схема подключения оптопары и усилителя
Выходное напряжение выбранного нами усилителя:
![]()
Тогда при освещении фотодиода мы будем снимать с выхода усилителя:
Выбираем диодную оптопару
типа АОТ162В, у которой  , тогда
, тогда  .
.
Рассчитаем напряжение для неосвещенного фотодиода, зная Io= 3·10-6A
![]()
Таким образом, окончательно выбираем оптопара типа АОТ162В
R1- МЛТ-0,125-15кОм±10%;
4.4 Разработка схемы подключения триггера Шмидта
Триггер Шмидта необходим для исключения обреза в сигнале.
Рисунок 4.7 – Исполнение триггера Шмидта
Резисторы R1 и R2 определяют зону гистерезиса, а напряжение UREF – срабатывание триггера Шмидта UREF = 5,03В.
Ширина гистерезиса определяется из выражения (0,5+0,001N)В, где N – число прорезей, исходя из условия задания N=90, тогда ширина гистерезиса будет равна 0,59В.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.