63. PI рэгулятары маюць наступны закон рэгулявання:

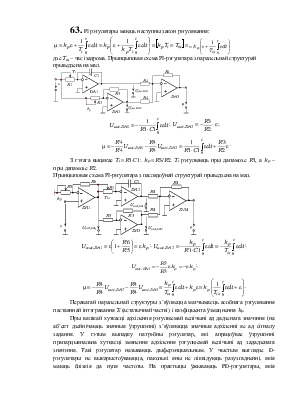
дзе Tis – час ізадрома. Прынцыповая схема PІ-рэгулятара з паралельнай структурай прыведзена на мал.
 ;
;  ;
;
![]()
 .
.
З гэтага выцякае Ti = R1×C1; kp = R3/R2. Ti рэгулююць пры дапамозе R1, а kp – пры дапамозе R2.
Прынцыповая схема PІ-рэгулятара з паслядоўнай структурай прыведзена на мал.
 ;
;  ;
;
![]() ;
;
 .
.
Перавагай паралельнай структуры з’яўляецца магчымасць асобнага рэгулявання пастаяннай інтэгравання Ti (астатычнай часткі) і каэфіцыента ўзмацнення kp.
Пры вялікай хуткасці адхілення рэгулюемай велічыні ад дадзенага значэння (на аб’ект дзейнічаюць значныя ўзрушэнні) з’яўляюцца значныя адхіленні яе ад сігналу задання. У гэтым выпадку патрэбны рэгулятар, які апрацоўвае ўзрушэнні прапарцыянальна хуткасці змянення адхілення рэгулюемай велічыні ад зададзенага значэння. Такі рэгулятар называюць дыферэнцыяльным. У чыстым выглядзе D-рэгулятары не выкарыстоўваюцца, паколькі яны не ліквідуюць разузгадненні, якія маюць блізкія да нуля частоты. На практыцы ўжываюць PD-рэгулятары, якія ўздзейнічаюць на аб’екты рэгулявання прапарцыянальна адхіленню регулюемай велічыні ад зададзенага значэння (для кампенсацыі ўзрушэнняў ці заданняў, якія мяняюцца павольна) і яе хуткасці (для кампенсацыі хутказменлівых адхіленняў ці ўставак рэгулятараў). Закон рэгулявання для PD-рэгулятара мае выгляд
 (9.5)
(9.5)
дзе Tpr – час апярэджання, Td – пастаянная часу дыферэнцавання. Пераходзячы ад функцый часу ў (9.5) да адлюстраванняў па Лапласу атрымаем
![]() ;
; ![]() ; (9.6)
; (9.6)
![]() ;
; ![]() . (9.7)
. (9.7)
Прынцыповая схема PD-рэгулятара з паралельнай структурай прыведзена на мал.
 ;
;  ;
;
 .
.
З апошняй формулы выцякае, што Td = R1×C1; kp = R3/R2. Td регулююць з дапамогай R1, а kp – R2.
Прынцыповая схема PD-рэгулятара з паслядоўнай структурай прыведзена на мал.
 ;
;  ;
;
 ;
;
 .
.
64. PID-рэгулятары (прапарцыянальна-інтэгральна-дыферэнцыяльныя) прадутуюць кіравальнае ўздзеянне, якое прапарцыянальна сігналу e, інтэгралу і вытворнай ад гэтага сігналу. Закон рэгулявання PID-рэгулятара запісваецца ў выглядзе
 . (9.8)
. (9.8)
Прынцыповая схема PІD-рэгулятара з паралельнай структурай прыведзена на мал.
 ;
;  ;
;
 ;
;
 .
.
Схема PІD-рэгулятара з паралельна-паслядоўнай структурай прыведзена на мал.
Напружанні на выхадах блокаў маюць выгляд
 ;
;  ;
;
 ;
;
 ;
;
 .
.
Пераходная характарыстыка PІD-рэгулятара.
 |
|||||||||||||||||
67677676767рпьр
Орпор
67. Структурная схема рэальнага P-рэгулятара
Перадатачная характарыстыка прыведзенай структуры мае выгляд

 . (9.10)
. (9.10)
З (9.10) выцякае, што рэальны P-рэгулятар прадстаўляецца паслядоўным злучэннем ідэальнага P-рэгулятара і баласнага аперыядычнага звяна, якое называюць дэмпфавальным.
перадатачная характарыстыка ідэальнага P-рэгулятара:
 ;
;
 .
.
З (9.11) выцякае, што ў зваротную сувязь узмацняльніка неабходна ўключыць інтэгратар з пастаяннай інтэгравання ў kp разоў большай за пастаянную інтэгравання выканаўчага механізма. Гэты інтэгратар на мал. 155 выканан на DA3 і DA4. Структурная схема рэальнага PI-рэгулятара
характарыстыка для гэтай схемы мае выгляд

 У адпаведнасці з (9.12) рэальны PI-рэгулятар
уяўляе паслядоўна злучаныя ідэальны PI-рэгулятар і дэмпфавальнае
звяно.
У адпаведнасці з (9.12) рэальны PI-рэгулятар
уяўляе паслядоўна злучаныя ідэальны PI-рэгулятар і дэмпфавальнае
звяно.
Структурныя схемы рэальнага PID-рэгулятара не адрозніваюцца з пункту гледжання злучэння неабходных блокаў ад дадзеных на мал. 156 і 157 схемаў PI-рэгулятараў.
Перадатачная характарыстыка рэальнага PID-рэгулятара, структура якога адпавядае мал. 156, набывае выгляд
 . (9.13)
. (9.13)
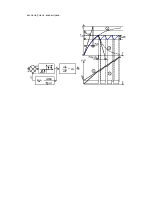
68. Структурная схема імпульснага P-рэгулятара прыведзена на мал. 168. Калі сігнал e на ўваходзе павялічваецца да ўзроўню, пры якім |s| > 0,5Dins, спрацоўвае рэлейны схема з гістэрэзісам і ўключае выканаўчы механізм, што мяняе становішча рэгулявальнага органа ў напрамку змяншэння модуля s. Калі s па-за зоны неадчувальнасці не выконваецца выраз –0,5Dins + + DB £ s £ 0,5Dins – DB, і выканаўчы механізм уздзейнічае на рэгулявальны орган. Пры |s|£ 0,5Dins – DB выканаўчы механізм выключаецца. Тады s = e – m×KFBK < 0,5Dins – DB. Пры 0,5Dins – DB ® ¥ e » m×KFBK, адкуль m = eKFBK–1 = ekp.
З дапамогай імпульснага рэгулявання магчыма рэалізаваць PI-рэгулятар па структурнай схеме, якая прыведзена на мал. 169. Нелінейны блок ахопліваюць адмоўнай зваротнай сувяззю ў выглядзе аперыядычнага звяна. Пры ўзнікненні на ўваходзе сігналу |e| > 0,5Dins на выхадзе нелінейнага элемента з’яўляецца напружанне U = z, якое ўключае выканаўчы механізм з пастаяннай хуткасцю і адначасова падае напружанне на блок зваротнай сувязі. На выхадзе апошняга ўзнікае напружанне Uout = x, якое павялічваецца па экспаненце 1 (мал. 170).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.