Министерство образования Республики Беларусь
Учреждение образования
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра автоматизации производственных процессов и электротехники
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К курсовой работе по электронным устройствам автоматики
Тема
РАЗРАБОТКА ЭЛЕКТРОННОГО УСТРОЙСТВА
Выполнила: студентка ф-та ХТиТ
3 курса, 4 группы
Ляхова М.В.
Проверил: Оробей И.О.
Минск 2006
Содержание
Введение
Задание к курсовому проекту
Заключение
Список использованной литературы
Приложение
ВВЕДЕНИЕ
Электронные системы и устройства автоматического управления являются мощным средством научно-технического прогресса. Их поведение основано на электромагнитных явлениях, обеспечивающих создание, передачу, прием, хранение и преобразование информационных потоков. Эти процессы, происходящие в системе автоматического управления, осуществляются посредством отдельных блоков и узлов системы, которые в подавляющем большинстве случаев состоят из электронных устройств. Каждое такое устройство, в свою очередь, можно рассматривать как некоторую более, простую систему, состоящую из более простых элементов. Изучение устройства как системы и как элемента различно.
Под системой понимают множество элементов, находящихся в связи, друг с другом и образующих определенную целостность, что означает принципиальную несводимость свойств системы к сумме свойств составляющих ее элементов и невыводимость свойств целого из этой суммы свойств элементов. Из этого вытекает также зависимость свойств от связей каждого элемента и от его места в системе, выполняемых функций и т. д. При изучении системы устанавливают ее структуру и взаимодействие элементов, описывают элементы с помощью моделей, отражающих определенный аспект функционирования системы, выявляют закономерности поведения и иерархию. Это позволяет объяснить функционирование системы и ее устройство.
Поведение каждого элемента в системе описывается моделью выполняемых функций. Ею чаще всего является передаточная функция, которая находится из внешних характеристик элемента. Характеристики многих из них весьма совершенны. Построенные на их основе электронные устройства обладают принципиально достижимыми возможностями и ограничениями. Функции подобных электронных устройств хорошо описываются простыми аналитическими соотношениями. Поэтому при изучении электронного устройства, предпочтительнее сначала рассмотреть работу этого устройства как системы, состоящей из более простых элементов, а затем изучить его внешние характеристики и описывающие их математические и схематические модели, как узлов системы автоматического регулирования.
К электронным устройствам автоматики предъявляются высокие требования, так как современная электронная аппаратура должна обеспечивать надежность работы сложнейших систем автоматического управления и контроля.
Современный этап развития радиоэлектронной аппаратуры характеризуется все более широким применением интегральных схем высокой функциональной сложности.
В данной курсовой работе предпринята попытка разработки системы стабилизации частоты вращения двигателя постоянного тока с использованием оптопары.
1. РАЗРАБОТКА ФУНКЦИОНАЛЬНОЙ СХЕМЫ
Принципиальная схема будет иметь вид:

2. РАСЧЕТ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ДВИГАТЕЛЯ
Для двигателя серии ДПМ-20-Н1-01 имеем:

![]()
![]()
|
|
|
|
|
Данная схема отражает структуру нашей системы.
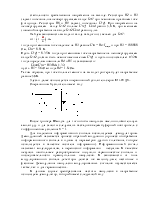
3. ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ПЕРВИЧНОГО ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ ВРАЩЕНИЯ В НАПРЯЖЕНИЕ
Для определения частоты вращения используем оптопару, рабочий зазор которой перекрывается диском, жестко закрепленным на валу ротора (частота вращения диска равна частоте вращения ротора). В качестве светоизлучающего диода возьмем светодиод с характеристиками приведенными в таблице №2.
Таблица№2.
|
Тип светодиода |
λmin…max,мкм |
Ре,мВт |
Iпр,мА |
Uпр=Uобр,В |
tи, мкс |
|
АЛ-307А |
0,845…0,875 |
4 |
10 |
20 |
15 |
В качестве приемника сигналов возьмем фотодиод с характеристиками, приведенными в таблице №3.
Таблица№3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.