|
Тип фотодиода |
Темновой ток не более Iт,мкА |
Uр,В |
Диапазон спектральной характеристики Δλmin…max, мкм |
Интегральная токавая чувствительность Si инт |
Максимальная спектральная характеристика Δλ, мкм |
|
ФД-8К |
5 |
7 |
0.5…1.1 |
4 |
0,85…0,92 |
Полученный сигнал с оптопары следует усилить и выделить из несущего сигнала информативный, убрав ненужные шумы.
Рассмотрим следующую схему:
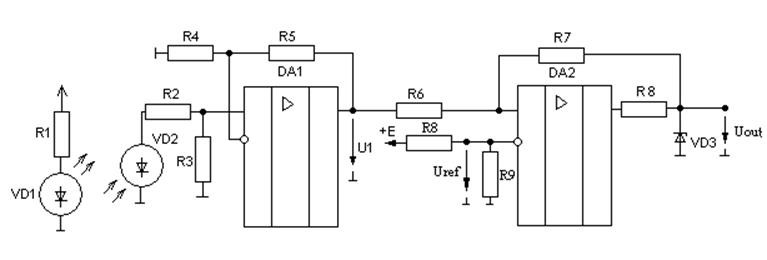
В данной схеме на DA1 выполнен неинвертирующий усилитель, а на DA2 неинвертирующий триггер Шмидта. VD3 – стабилитрон предназначенный для стабильности срабатывания напряжения на выходе. Резисторы R2 и R3 задают потенциал на неивертирующем входе DA1 при темновом и рабочем токе фотодиода. Резисторы R8 и R9 задают потенциал Uref. При напряжении на неивертирующем входе DA2 больше UrefUoutравно 5,6 В, при меньшем значений напряжения на входе DA2 Uoutравно нулю.
Найдем зависимость выхода от входа каждого из звеньев для DA1 :
![]() , тогда
при темновом токе падение на R3 равное Uin = R3·Iтемн, и при R3 = 100000 Ом, Uin = 0.01 В.
, тогда
при темновом токе падение на R3 равное Uin = R3·Iтемн, и при R3 = 100000 Ом, Uin = 0.01 В.
Пусть Uref = 0.35 В тогда при темновом токе напряжение на неинвертирующем входе DA2 должно быть немного меньше чем Uref и пусть оно составляет 0.32 В тогда определим номиналы R4 и R5 из зависимости:
Uout/Uin = R5/R4+1≈32, пусть R5 = 56кОм тогда R4 = 1.8кОм.
Таким образом, при токе больше темного на выходе триггера будет напряжение равное 5,6В.
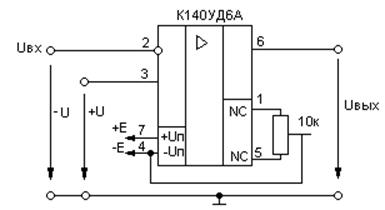
Здесь и далее используется операционный усилитель серии К140УД14.
Операционный усилитель имеет вид:
После триггера Шмидта для того чтобы импульсы имели положительную амплитуду и для защиты следующих каскадов введем буферный повторитель с коэффициентом усиления К = 1.
Для выделения информативного сигнала воспользуемся демодулятором. Демодуляцией называется процесс обратный модуляции (процесс отображения информационного сигнала в одном из параметров другого колебания, которое используется в качестве носителя информации). Информационный сигнал называют моделирующим, а переносчик информации – несущим. В качестве несущих наибольшее распространение получили гармонические сигналы и последовательности прямоугольных импульсов. В зависимости от типа модулированного сигнала детекторы делятся на: амплитудные, частотные и фазовые. Демодуляция импульсно-модулированных сигналов осуществляется также, как и для гармонических.
В данном случае преобразования частоты импульсов в напряжение используем демодулятор, который имеет следующий вид:
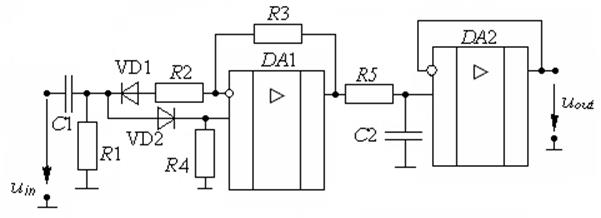
На C1, R1 выполнена частотно-зависимая цепь которая представляет собой ФВЧ первого порядка, а на R4 и C2 фильтр ФНЧ. На DA1, R2, R3, R4, VD1 и VD2 реализована схема взятия модуля. На DA2 выполнен буферный повторитель с коэффициентом усиления К = 1.
Найдем амплитудно-частотную характеристику (АЧХ) для ФВЧ:
 , где Т = R1·C1.
, где Т = R1·C1.
Для нахождения Т рассмотрим следующий график:
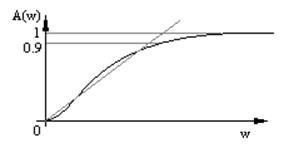
Из графика видно до уровня 0,9 АЧХ является возрастающей и близка к линейной, поэтому Т найдем из предположения что
ωmax = (10000·/60·)·2·π рад/с и соответствует уровню А(ω)=0,9.
отсюда Т = 0,197·10-2 . Далее подбираем R1 и C1.
Пусть R1=39000 Ом, тогда С1=10·10-9 .
Далее промоделируем в системе MatLab для нахождения R4 и C2 при этом на вход демодулятора поступают импульсы с максимальной амплитудой равной 8.2 В и частотой равной fnom = 9000/60·0,7·50 = 5.25·103 Гц то есть на номинальной частоте вращения вала двигателя:
Графики переходных процессов при этом имеют вид:
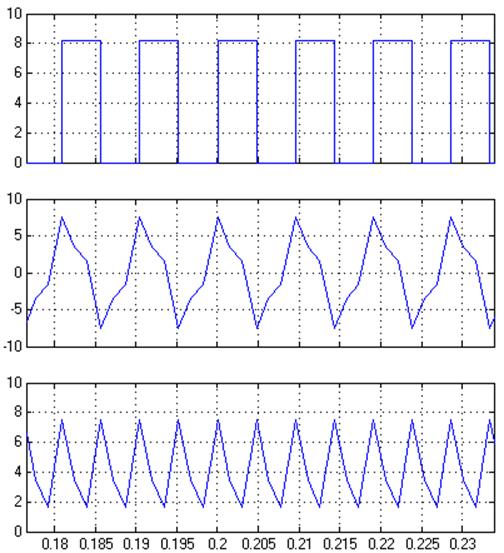
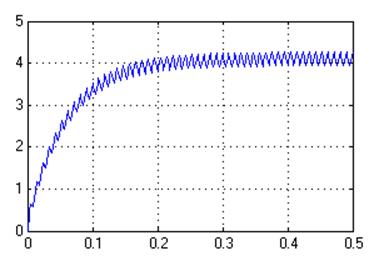
На выходе получим:
4. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ НАСТРОЙКИ ПИД-РЕГУЛЯТОРА
Для расчета различных систем автоматического управления их обычно разбивают на отдельные элементы, динамическими характеристиками которых являются дифференциальные уравнения не выше второго порядка. Далее находят параметры регулятора, который, обеспечивал бы устойчивость работы всей системы при этом, обеспечивая нужные параметры регулирования и требуемый запас устойчивости. При практических расчетах запас устойчивости удобно характеризовать показателем колебательности системы, величина которого в системах, совпадает с максимумом амплитудно-частотной характеристики замкнутой системы регулирования. Регулятор с обратной связью при отклонении текущего значения регулируемой величины от заданного оказывает воздействие на объект в сторону уменьшения рассогласования. При этом воздействие регулятора на объект постепенно уменьшается. Определив свойства объекта, выбирают регулятор.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.