Пропорциональный регулятор (П-регулятор).
Пропорциональный закон регулирования имеет вид:
u(t) = Wрег(p) x(t) = k1x(t) , где k1 – коэффициент усиления П- регулятора,
Wрег(p) – передаточная функция регулятора,
x(t) – входное воздействие.
u(t) = k2![]() или
u(t) = Wрег(p) x(t)
= (k2/p)x(t), где k2 - коэффициент пропорциональности, численно равный
скорости перемещения регулирующего органа при отклонении регулируемой величины
на единицу ее измерения, называется коэффициентом передачи И - регулятора
или
u(t) = Wрег(p) x(t)
= (k2/p)x(t), где k2 - коэффициент пропорциональности, численно равный
скорости перемещения регулирующего органа при отклонении регулируемой величины
на единицу ее измерения, называется коэффициентом передачи И - регулятора
Изодромный закон регулирования имеет вид:
u(t) = k1x(t)
+ k2![]() или u(t) = Wрег(p)
x(t) = (k1 + k2/p)
x(t) , где k2=1/Тиз
, Тиз – постоянная времени, называемая временем интегрирования
или временем изодрома.
или u(t) = Wрег(p)
x(t) = (k1 + k2/p)
x(t) , где k2=1/Тиз
, Тиз – постоянная времени, называемая временем интегрирования
или временем изодрома.
Регулирование с использованием одного канала, чувствительного к производной сигнала не имеет самостоятельного значения, т.к. сигнал управления:
u(t) = Wрег(p) x(t) = k3 p x(t) , будет равен нулю при p®0 (т.е. в установившемся режиме). Поэтому обязательно наличие параллельного либо П, либо И-канала, а чаще обоих:
u(t) = (k1 + k2/p + k3 p) x(t) .
Пропорциональное регулирование с введением в закон регулирования производной от регулируемой величины ( ПД - регулятор).
Данный закон регулирования имеет вид:
u(t) = k1x(t) + k3x(t)dt или u(t) = (k1 + k3 p) x(t),
где k3=1/Тпр , Тпр - постоянная времени , характеризующая степень ввода в закон регулирования производной, называется постоянной времени дифференцирования, или временем предварения регулятора.
Пропорциональное регулирование с введением в закон регулирования интеграла и производной от регулируемой величины
( ПИД - регулятор).
ПИД – закон регулирования имеет вид:
u(t) = k1x(t)
+ k3x(t)dt+k2![]() или u(t) = (k1
+ k2/p + k3 p) x(t)
.
или u(t) = (k1
+ k2/p + k3 p) x(t)
.
В динамическом отношении эти регуляторы подобны системе из трех параллельно включенных звеньев: безинерционного, интегрирующего и идеального дифференцирующего.
Далее в пакете MatLab промоделируем данную систему и найдем параметры настройки ПИД–регулятора, принимая во внимания постоянные времени каждой передаточной функции. При этом отбросиваем несущественные звенья с малыми постоянными времени.
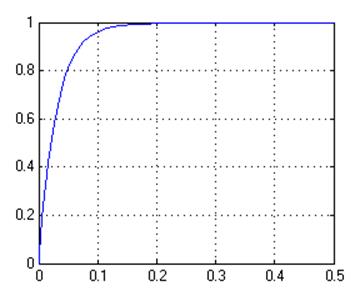
Тогда система приобретает вид:
График переходного процесса приведен ниже:
Для нахождения параметров настройки ПИД-регулятора воспользуемся пакетом MatLab:
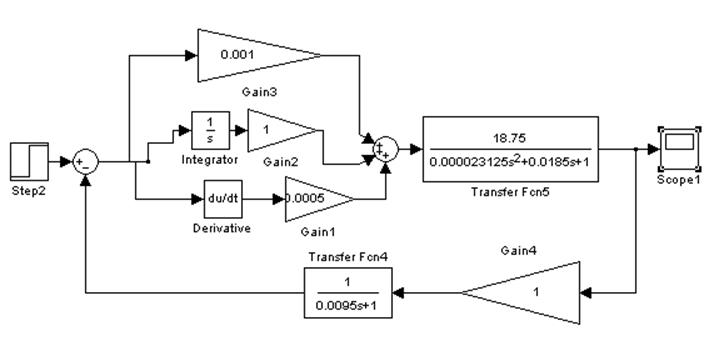
Коэффициенты ПИД – регулятора при этом равны Кр = 0,001 , Ки = 1, Кд =0,0005, отсюда находим номиналы резисторов и конденсаторов для электрической схемы ПИД – регулятора.
5. РАСЧЕТ ТОЧКИ СУММИРОВАНИЯ
Сумматор сигнала обратной связи и задающего сигнала выполним по универсальной схеме суммирования-вычитания. Схема будет иметь вид:
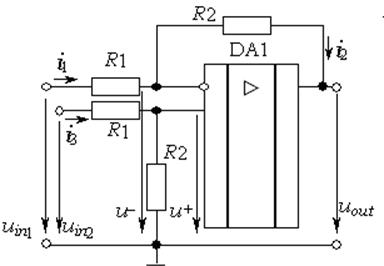
Данный ОУ с единичным коэффициентом усиления. R1=R2=2.2kOm
На первый вход сумматора подается сигнал с демодулятора, а на второй сигнал с задатчика. Он рассчитывается следующим образом:
Uзад=0.8Uном=0.8*12=9.6В
Т.о. на сумматоре происходит вычитание напряжения задатчика из напряжения преобразованного из частоты. На выходе сумматора имеем статическую ошибку, которую подаем на регулятор. Регулятор делает то, что уменьшает статическую ошибку.
6.Выбор структуры и расчет схемы индикации частоты вращения вала двигателя.
В цифровых устройствах для индикации параметров, текущего состояния системы и ее компонентов, результатов измерений наиболее часто применяют семисегментные индикаторы, в которых стилизованное изображение цифр составляется семью сегментами.
Свечение сегмента может происходить при подаче на него напряжения логической единицы (индикаторы с общим катодом) или напряжения логического нуля (индикатор с общим анодом).
В зависимости от того, как работает в схеме индикатор (непрерывно или периодически), различают соответственно статический и динамический типы индикации.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.