окружность вырождается в точку с координатами [-1;j0]. Затем на рассматриваемой комплексной плоскости строится АФЧХ. Наименьшая окружность, которой коснется АФЧХ, определит значение М рассматриваемой системы.
Если при проектировании системы ставится условия, чтобы ее показатель колебательности был не больше некоторого заданного, то для выполнения этого необходимо, чтобы амплитудно-фазовая характеристика не заходила внутрь окружности, соответствующей этому значению М. Амплитудно-фазовая характеристика может только коснуться этой окружности. В этом случае показатель колебательности будет как раз равен заданному значению рис. 3.3:
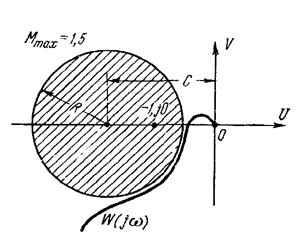
Рис.3.3. Амплитудно-фазовая характеристика при показатели колебательности равном желаемому.
Таким образом, окружность ![]() является запретной зоной для амплитудно-фазовой
характеристики разомкнутой системы. Эта зона охватывает точку (1, j0) и
обеспечивает получение заданного запаса устойчивости.
является запретной зоной для амплитудно-фазовой
характеристики разомкнутой системы. Эта зона охватывает точку (1, j0) и
обеспечивает получение заданного запаса устойчивости.
Для синтеза регулятора зададимся М=1.18. При
передаточной функции разомкнутой системы ![]() необходимо подобрать такие коэффициенты регулятора,
чтобы
необходимо подобрать такие коэффициенты регулятора,
чтобы ![]() касалась окружности с желаемым значением М. Можно
это делать подбором коэффициентов, однако, желательно иметь какие – либо
правила, которые уменьшили бы число настроек. Построим окружность с желаемым М,
и проведём к ней касательную.
касалась окружности с желаемым значением М. Можно
это делать подбором коэффициентов, однако, желательно иметь какие – либо
правила, которые уменьшили бы число настроек. Построим окружность с желаемым М,
и проведём к ней касательную.
Принимаем, что пропорциональная составляющая передаточной функции регулятора К=1. Задавшись постоянной интегрирования (например, Ти=1), строим АФЧХ разомкнутой системы. Проводим луч из начала координат с углом наклона:
![]() (3.6)
(3.6)
Далее строим окружность с центром, лежащим на оси
абсцисс так, чтобы она коснулась прямой и нашей АФЧХ. Восстановив перпендикуляр
в точке касания прямой и окружности к оси абсцисс, получим значение А. Далее
задаваясь другими значениями постоянной интегрирования строим новые АФЧХ и
повторяем операцию с построением окружности. Получив набор постоянных
интегрирования и соответствующим им коэффициентов усиления, строим кривую ![]() . Проводим из начала координат касательную к кривой,
и в точке касания мы получим оптимальные значения k и Ти,
при подстановке которых в передаточную функцию, АФЧХ разомкнутой системы
коснется окружности с заданным показателем колебательности.
. Проводим из начала координат касательную к кривой,
и в точке касания мы получим оптимальные значения k и Ти,
при подстановке которых в передаточную функцию, АФЧХ разомкнутой системы
коснется окружности с заданным показателем колебательности.
Принимаем коэффициент пропорциональности регулятора К=1 и, задавшись значениями постоянной времени регулятора, строим АФЧХ разомкнутой системы, луч из начала координат с углом наклона:
![]() (3.7)
(3.7)
По изложенной методике рассчитан ПИ регулятор, расчёт выполнен в пакете Matlab, расчёты приведены ниже, а также показаны на плакате расчёта регулятора и моделирования системы.
Расчет параметров ПИ-регулятора
% clear - очистка ячеек памяти от всех переменных;
% clc - очистка содержимого командного окна;
% clf - очистка графического окна;
clc, clf, clear;
% задаем передаточную функцию объекта;
% tf - transfer function - передаточная функция;
% tf([числитель], [знаменатель], ...)
ww=tf([2,465],[55496,9 1]);
% вывод графика АФЧХ (диаграмма Найквиста);
figure(1);
nyquist(ww);
% задаем величину желаемого показателя качесва Мжел.;
M=1.18;
w=0:0.0005:2;
% задаем величину коэффициента пропорцианальности
kp=0.7;
% подбираем постоянную времени интегрирования (время изодрома) т.о., чтобы окружность коснулась АФЧХ
Tiz=700;
% заменяем p на jw для перехода в комплексную область
p=j*w;
www=kp.*(1+1./(Tiz.*p))*2.465./( 55496.9*p+1);
% создаем функции для изображения АФЧХ в комплексной области;
Re=real(www);
Im=imag(www);
% объявляем радиус окружности
R=M/(1-M^2);
% C - расстояние от мнимой оси до центра окружности;
C=M^2/(1-M^2);
x=-2:0.005:0;
% Геометрия x^2 + y^2 = R^2 - формула, описывающая окружность
% y1 - верхняя часть окружности; y2 - нижняя часть окружности;
y1=sqrt(R^2-(x-C).^2);
y2=-sqrt(R^2-(x-C).^2);
% k - тангенс угла наклона касательной к окружности
k=tan(asin(1/M));
% задаем уравнение прямой;
y3=k*x;
figure(2);
plot(Re, Im, x, y1, 'r', x, y2, 'r', x, y3);
% grid - вывод "сетки" на графике;
grid on;
% задаем вектор значений kp;
kp=[0 0.1 0.2 0.3 0.4 0.5 0.6 0.7];
% % задаем вектор значений Tiz;
Tiz=[0 152 222 296 357 418 512 700];
% строим график зависимости kp от Tiz к которому затем проведем; касательную и найдем оптимальный вариант значений kp и Tiz;
figure(3);
plot(Tiz, kp);
grid on.
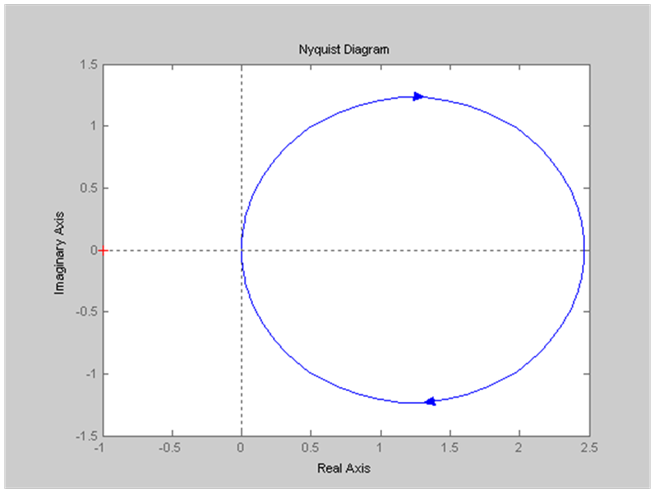
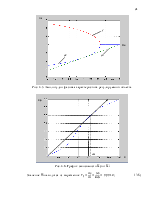
Рис. 3.4. АФЧХ (диаграмма Найквиста)
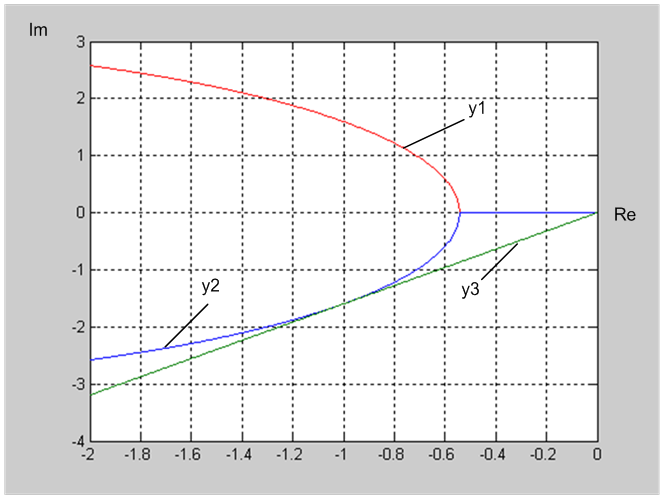
Рис. 3.5. Амплитудно-фазовая характеристика регулируемого объекта
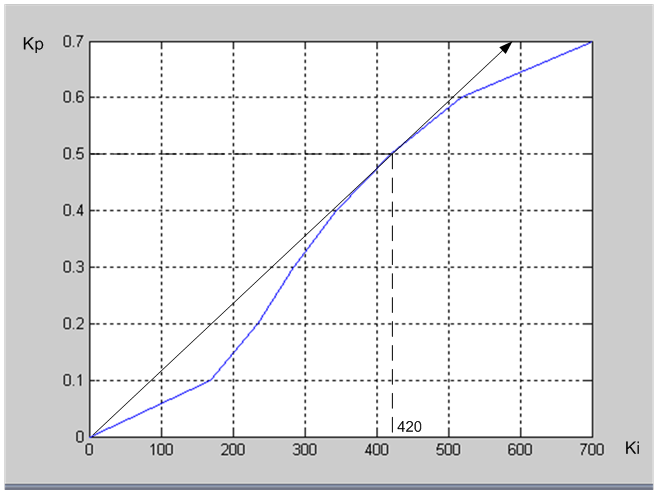
Рис. 3.6. График зависимости Kp от Ki
Значение Ti
находится
из выражения: ![]() ; (3.8)
; (3.8)
Коэффициент передачи клапана: ![]() ; (3.9)
; (3.9)
В качестве датчика был выбран бесконтактный радарный датчик уровня, его коэффициент передачи равен 1. Так как датчик уровня является очень быстрым – его постоянная времени очень мала, таким образом его передаточная функция близка к 1. Отсюда следует, что при моделировании системы в пакете MATLAB мы можем пренебречь данным датчиком.
На основании рассчитанных данных смоделируем систему в пакете MATLAB.
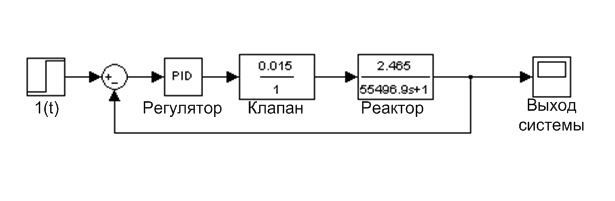
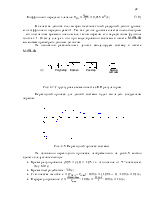
Рис. 3.7. Структурная схема объекта с ПИ-регулятором
Переходный процесс для данной системы будет выглядеть следующим
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.