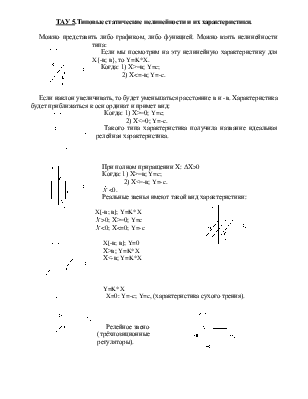




ТАУ 5.Типовые статические нелинейности и их характеристики.
Можно представить либо графиком, либо функцией. Можно взять нелинейности типа:
 Если мы посмотрим на эту нелинейную характеристику для
X{-в; в}, то Y=K*X.
Если мы посмотрим на эту нелинейную характеристику для
X{-в; в}, то Y=K*X.
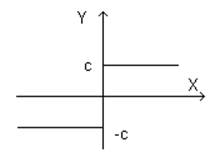
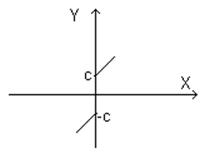
Когда: 1) Х>=в; Y=c;
2) Х<=-в; Y=-c.
Если наклон увеличивать, то будет уменьшаться расстояние в и -в. Характеристика будет приближаться к оси ординат и примет вид:
 Когда: 1) Х>=0; Y=c;
Когда: 1) Х>=0; Y=c;
2) Х<=0; Y=-c.
Такого типа характеристика получила название идеальная релейная характеристика.
 При полном приращении Х: ΔX>0
При полном приращении Х: ΔX>0
Когда: 1) Х>=в; Y=c;
2) Х<=-в; Y=-c.
![]() <0.
<0.
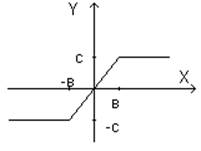
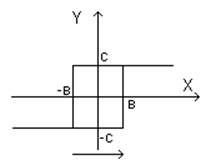
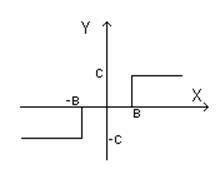
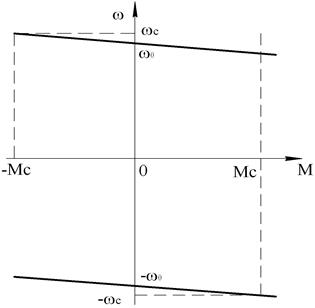
Реальные звенья имеют такой вид характеристики:
X[-в; в]; Y=K*X
![]() >0; Х>=0; Y=c
>0; Х>=0; Y=c
![]() <0; Х<=0; Y=-c
<0; Х<=0; Y=-c
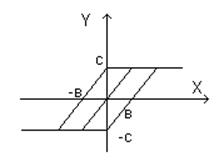
X[-в; в]; Y=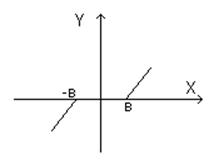 0
0
Х>в; Y=K*X
Х<-в; Y=K*X
Y=K*X
 X=0: Y=-c; Y=c,
(характеристика сухого трения).
X=0: Y=-c; Y=c,
(характеристика сухого трения).
Релейное звено (трёхпозиционные регуляторы).
МОД 5-1. Модель идеального вытеснения.
За структуру потока принимаем: поршневое течение жидкости без продольного перемешивания.
Схема данного потока изображена на рисунке:
 l – длина потока;
l – длина потока;
z – линейная координата;
![]()

u – линейная скорость, υ (const) – объемная скорость.
 Выделим из данного потока j-ую
элементарную ячейку.
Выделим из данного потока j-ую
элементарную ячейку.
Нестационарный режим в данной ячейке, т.е. накопление
 ,
подставив уравнение потоков получим
,
подставив уравнение потоков получим  учитывая что
учитывая что ![]() ,
,  . Разделим
последнее выражение на
. Разделим
последнее выражение на ![]() и получим
и получим  ;
;
![]()
 . Продифференцируем по
времени левую и правую часть, в правой части перейдем к пределу
. Продифференцируем по
времени левую и правую часть, в правой части перейдем к пределу ![]() .
.
 . С
учетом
. С
учетом  , получим
, получим  -
модель идеального вытеснения. Полученная модель – модель с распределенными
параметрами. Концентрация, в общем случае, является функцией времени и координаты:
-
модель идеального вытеснения. Полученная модель – модель с распределенными
параметрами. Концентрация, в общем случае, является функцией времени и координаты:
![]()
 . Далее преобразуем по
Лапласу по времени при нулевых начальных условиях
. Далее преобразуем по
Лапласу по времени при нулевых начальных условиях
 . Решение данного уравнения:
. Решение данного уравнения:  . Учитывая граничные условия:
. Учитывая граничные условия:
МОД 5-2
 ,
,  (τ – время пребывания).
(τ – время пребывания).
 -
чистое звено запаздывания.
-
чистое звено запаздывания.

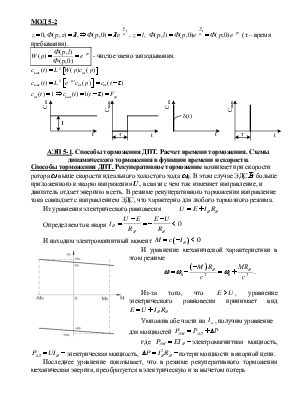
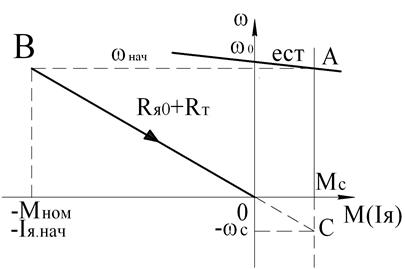
АЭП 5-1. Способы торможения ДПТ. Расчет времени торможения. Схемы динамического торможения в функции времени и скорости.
Способы торможения ДПТ. Рекуперативное торможение возникает при скорости ротора ω выше скорости идеального холостого хода ω0. В этом случае ЭДС Е больше приложенного к якорю напряжения U, в связи с чем ток изменяет направление, и двигатель отдает энергию в сеть. В режиме рекуперативного торможения направление тока совпадает с направлением ЭДС, что характерно для любого тормозного режима.
Из уравнения электрического равновесия ![]()
Определяем ток якоря 
И находим электромагнитный момент ![]()
 И уравнение механической характеристики в этом режиме
И уравнение механической характеристики в этом режиме
Из-за того, что ![]() ,
уравнение электрического равновесия принимает вид
,
уравнение электрического равновесия принимает вид ![]()
Умножив
обе части на ![]() , получим уравнение для мощностей
, получим уравнение для мощностей ![]()
где ![]() электромагнитная
мощность,
электромагнитная
мощность, ![]() электрическая мощность,
электрическая мощность, ![]() потери мощности в якорной цепи.
потери мощности в якорной цепи.
Последнее уравнение показывает, что в режиме рекуперативного торможения механическая энергия, преобразуется в электрическую и за вычетом потерь
АЭП 5-2возвращается в сеть. В установившемся режиме
рекуперативное торможение возможно в ограниченном классе электроприводов при
действии активного статического момента когда ![]() .
.
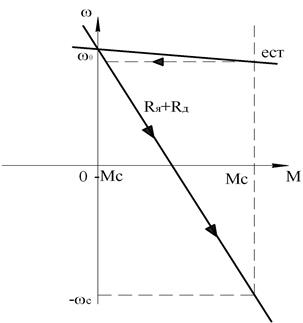 Торможение противовключением происходит тогда, когда двигатель, включенный на
вращение в одном направлении, под действием внешних сил или сил инерции
вращается в противоположном направлении. В режиме противовключения изменяет
знак скорость двигателя при сохранении знака электромагнитного момента или изменяет
знак момент при сохранении знака скорости.
Торможение противовключением происходит тогда, когда двигатель, включенный на
вращение в одном направлении, под действием внешних сил или сил инерции
вращается в противоположном направлении. В режиме противовключения изменяет
знак скорость двигателя при сохранении знака электромагнитного момента или изменяет
знак момент при сохранении знака скорости.
 Первый случай имеет место при воздействии активного
статического момента, который превышает момент короткого замыкания
Первый случай имеет место при воздействии активного
статического момента, который превышает момент короткого замыкания ![]() : направление тока совпадает с направлением
ЭДС, что указывает на тормозной режим. Механическая характеристика
представляется формулой
: направление тока совпадает с направлением
ЭДС, что указывает на тормозной режим. Механическая характеристика
представляется формулой  .
.
Поэтому ![]() и скольжение
и скольжение 
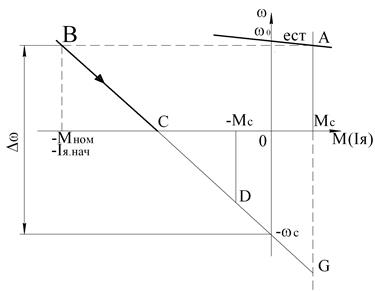
Второй случай режима противовключения возникает при реверсировании двигателя за счёт перемены полярности подводимого к якорю напряжения с помощью контактов «вперёд» и «назад».
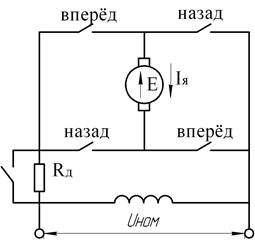
При этом ток двигателя изменяет своё направление,
изменяется соответственно и знак момента, который становится тормозным по
отношению к прежнему направлению движения. Для ограничения тока в якорную цепь
вводится добавочное сопротивление. Уравнения равновесия напряжений ![]() ,
, ![]() ,
откуда ток якоря
,
откуда ток якоря 
Уравнение механической характеристики

где  .
.
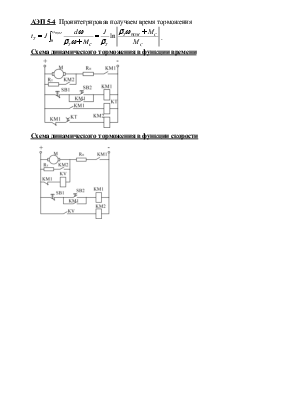
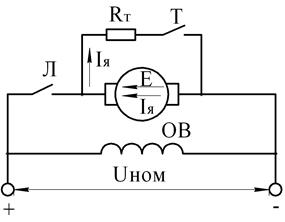
Динамическое торможение происходит, если вращающийся якорь электродвигателя отключается от сети и замыкается на внешнее сопротивление, а
АЭП 5-3 обмотка возбуждения
оставляется подключённой к источнику. В обмотке вращающегося по инерции якоря
индуцируется ЭДС Е, под действием которой в замкнутой цепи якоря протекает
ток ![]() . Направление тока якоря противоположно
двигательному режиму. Ток якоря вычисляют по формуле
. Направление тока якоря противоположно
двигательному режиму. Ток якоря вычисляют по формуле
 , где
, где ![]() тормозное
сопротивление.
тормозное
сопротивление.
 В режиме динамического торможения
В режиме динамического торможения ![]() , поэтому
, поэтому ![]() , что
определяет электромеханическую
, что
определяет электромеханическую  и механическую
и механическую  характеристики. Следовательно, в режиме
динамического торможения линейные электромеханические и механические характеристики
проходят через начало координат.
характеристики. Следовательно, в режиме
динамического торможения линейные электромеханические и механические характеристики
проходят через начало координат.
Динамическое торможение наиболее эффективно при
больших скоростях. Для ограничения броска тормозного тока ![]() и момента
и момента ![]() якорь
электродвигателя замыкается на тормозное сопротивление
якорь
электродвигателя замыкается на тормозное сопротивление ![]() ,
величина которого определяется по формуле
,
величина которого определяется по формуле
 .
.
Энергетические соотношения: ![]() .
После умножения левой и правой части на
.
После умножения левой и правой части на ![]() получаем:
получаем:
![]() ,
, ![]() . Это
значит, что при динамическом торможении электромагнитная мощность
. Это
значит, что при динамическом торможении электромагнитная мощность ![]() превращается в потери
превращается в потери
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.