ТАУ 22. Синтез дискретных компенсационных регуляторов из условия желаемого расположения полюсов ХАУ.
Пусть структура системы имеет вид: x(k+1)=Ax(k)+Bu(k). Пусть структура регулятора будет в такой же матричной форме: u(k)=-Gx(k). Неизвестной является матрица G. Воспользуемся косвенными показателями качества, например расположением полюсов (корней ХАУ) системы.
Пусть полюса ХАУ z1, z2,…, zi известны.
x(k+1)=Ax(k)-BGx(k); zx(z)=Ax(z)+Bu(z); [zI-A]x(z)=Bu(z); (zI-A+BG)x(z)=0;
Для разомкнутой функции можно сказать, что х связан с коэффициентом: -G[zI-A]-1B=Tp;
Когда система замкнута, то можно записать: -G[zI-A+BG]B=Tз;
 I-Tp=To;
I-Tp=To;
![]()
![]() (zI-A+BG)=(zI-A)(I+[zI-A]-1B)
(zI-A+BG)=(zI-A)(I+[zI-A]-1B)
Если взять модуль, то  справедливо. Тогда получим, что To=I+G[zI-A]-1B=
справедливо. Тогда получим, что To=I+G[zI-A]-1B= ![]() ;
;  .
Необходимо, чтобы
.
Необходимо, чтобы ![]() . Это также является качеством
системы. Можно записать, что: K=Adj(zI-A)B;
. Это также является качеством
системы. Можно записать, что: K=Adj(zI-A)B;  . K=[K1,K2,…Ki];
. K=[K1,K2,…Ki];
![]() . Когда можно найти К-1, то имеем
решение задачи:
. Когда можно найти К-1, то имеем
решение задачи: ![]() .
.
[B AB A2B …],
когда система управляема, то можно найти элементы матрицы G. В случае кратности корней, продифференцируем
выражение ![]() :
:
z2: ;
;  ;
;
z3: ;
;  ;
;
Все это проделано при условии одноканального управляющего воздействия.
МОД 22-1.Определение передаточной функции объектов методом моментов.
W(p)=
Разложим
в ряд ![]()

Тогда
W(p)=
Момент n-го порядка импульсной функции
Тогда
W(p)=
Для
определения моментов используются корреляционные функции![]()
![]()
Представим
![]() как сумму корреляционных моментов
как сумму корреляционных моментов



Раскроем скобки
Приравниваем коэффициенты при соответствующих степенях
![]()
МОД 22-2
![]()
![]()


Если на вход моделирующего объекта поступает случайный моделированный сигнал, то корреляционная функция данного сигнала имеет четный порядок. Поэтому все моменты нечетного порядка равны нулю:
![]()
![]()
![]()
![]()
![]()
Отсюда моменты будут равны:


При
входном сигнале объекта типа белый шум корреляционная функция представляет
собой ![]() -функцию. Можно получить зависимость, при
которой все моменты корреляционной функции нулевые:
-функцию. Можно получить зависимость, при
которой все моменты корреляционной функции нулевые:
![]()
![]()
![]()
![]()
![]()
На практике порядок передаточной функции ограничен, поэтому возникает погрешность в определении динамических характеристик данного объект
АЭП 22Торможение АД противовключением и конденсаторное.
Конденсаторное
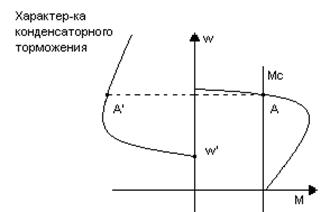
В этом случае направление вращения то же, а электромагнитный момент становится отрицательным. При таком торможении АД работает в режиме генератора с самовозбуждением.
Реактивная мощность, необходимая для возбуждения, поступает в цепь статора от батареи конденсаторов. Самовозбуждение возникает за счет остаточного магнитного потока. При вращении ротора по инерции, после отключения от сети, в обмотках статора возникает небольшая ЭДС, под действием которой в цепи статора протекает ток, благодаря конденсатору являющийся чисто реактивным (подмагничивающим): в результате магн. поток АД увелич., увелич. ЭДС и ток статора. После самовозбуждения АД переходит в генераторный режим (2 квадрант), возникает тормозной момент (-М), благодоря которому осуществляется более интенсивное торможение. Если емкость увеличить, то область торможения снижается в область более низких скоростей. Данный вид торможения имеет больший тормозной момент в начале торможения, чем динамическое торможение ( большие скорости), это выгодно отличает конденс. торможение.
Плюсы: схемы просты, экономичны, так как энергия возбуждения из сети не потребляется. При постоянном (глухом) подключении конденсаторов к АД для обеспечения торможения достаточно отключить двигатель от сети. В более ответственных случаях, обеспечение торможение, применяют сочетание конденсаторного и динамического (на больших скоростях – конденс., на малых – динамич.).
Противовключение.
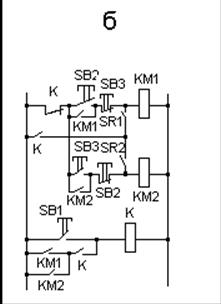
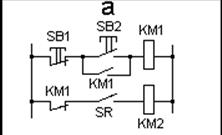
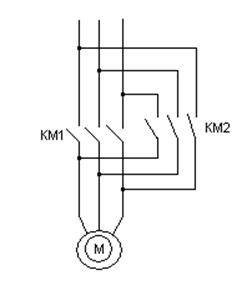
а,б – схемы управления нереверсивного и реверсивного.
Каждый контактор КМ1, КМ2 выполняет функции линейные и тормозные, в зависимости от направления вращения двигателя. Основа схемы – реверсивный магнитный пускатель. Функции блокировки осуществляют кнопки SB1 - пуск (в КМ1) и одновременно SB2 – стоп в КМ2.
Особенности контактов реле скорости КМ1 – вперед, КМ2 – назад.
При работе вперед замкнут контакт SR2, при работе назад замкнут SR1.Подготавливая тем самым схему к тормржению. Реле К контакты которого подключают реверсивный пускатель КМ1 и КМ2 к сети.
Скольжение при торможении 
МЕТ 22-1. Непрерывные методы измерения плотности ж-сти весовым, гидростатическим, поплавковым и вибрационным методами.
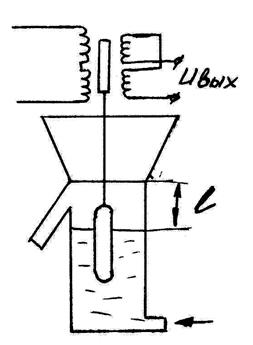
 Весовые СИП.Принцип действия состоит в непрерывном
взвешивании постоянного объёма анализируемого в-ва, т.е. плотность выражается
через удельный вес. Плотномер с V-образной трубкой. Для установления нулевого значения
установлен противовес. Статической хар-кой яв-ся зависимость: ρ=γ/g=P/V*g,
где γ- удельная плотность. Т.к. объём, заключённый в этой области, и g=const,
то на рычаг действует сила P~ ρ. Особенностью яв-ся динамическая хар-ка- это
уравнение 2го порядка, описывающее функцию колебательного звена: W(p)=k/(T22 p2+T1p+1). Диапазон измерения 0,5-2,5г/см3. Температурный
диапазон измерения до100оС, класс точности 1-1,5.
Весовые СИП.Принцип действия состоит в непрерывном
взвешивании постоянного объёма анализируемого в-ва, т.е. плотность выражается
через удельный вес. Плотномер с V-образной трубкой. Для установления нулевого значения
установлен противовес. Статической хар-кой яв-ся зависимость: ρ=γ/g=P/V*g,
где γ- удельная плотность. Т.к. объём, заключённый в этой области, и g=const,
то на рычаг действует сила P~ ρ. Особенностью яв-ся динамическая хар-ка- это
уравнение 2го порядка, описывающее функцию колебательного звена: W(p)=k/(T22 p2+T1p+1). Диапазон измерения 0,5-2,5г/см3. Температурный
диапазон измерения до100оС, класс точности 1-1,5.
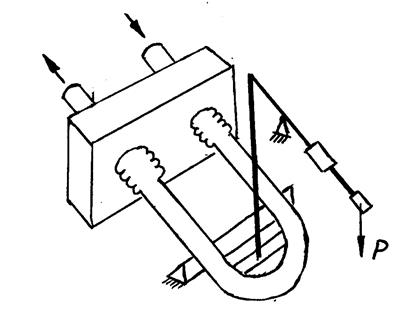
Поплавковые СИП. Принцип действия основан на непрерывном измерении выталкивающей силы. Рвыт=V*γ/. Равновесие под действием веса и выталкивающей силы: G=m*g; N=V*ρж*g; Техническая реализация автоматического плотномера яв-ся плотномер с переливом ж-сти. При изменении ρж положение поплавка будет изменяться, т.е. изменяться величина l. Величина N=(N+l*S)* ρж*g. Из условия равновесия G=N. Тогда l=(m-V* ρж)/S*g=m/S* ρж-V/S. Величина l связана с плотностью, а значит с величиной ΔUвых. С увеличением ρ l уменьшается. Интервал измерения плотности 0,5-1,2г/см3. Погрешность 1,5-3% от диапазона измерения.
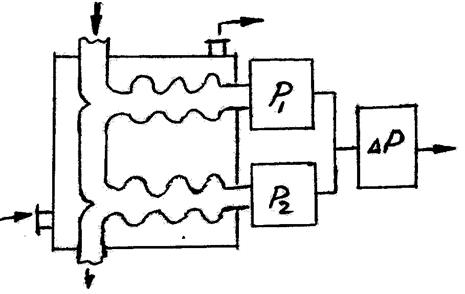
Гидростатические СИП. Принцип действия основан на зависимости давления столба ж-сти от плотности: P=ρ*g*h, ρ=ΔP/g*h- статическая хар-ка. Плотномер с сильфонами, расположенными на разной высоте.
МЕТ 22-2
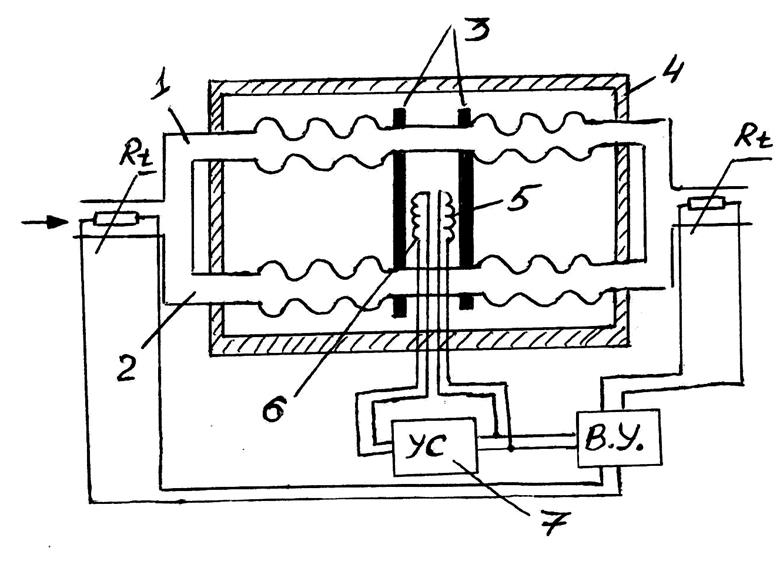
Вибрационные
СИП. Принцип действия основан на
зависимости частоты резонатора, находящегося в анализируемом в-ве, от плотности
в-ва. Частота собственных колебаний резонатора и частота колебаний в в-ве
связаны зависимостью:  . Резонаторы
выполняются в виде трубок, пластин, струн. В зависимости от конструкции они
бывают проточные и погружные. В 1ых в-во протекает через внутренние
полости; во 2ых- сами погружаются в ж-сть.
. Резонаторы
выполняются в виде трубок, пластин, струн. В зависимости от конструкции они
бывают проточные и погружные. В 1ых в-во протекает через внутренние
полости; во 2ых- сами погружаются в ж-сть.
Проточный вибрационный плотномер. Анализируемая ж-сть поступает в две трубки- резонаторы. Обе трубки закреплены в сильфоне и скреплены жёсткими перемычками 3. вся конструкция находится в жёсткой оснастке 4. Между трубками расположены две катушки: катушка, возбуждающая колебания 5, и воспринимающая колебания6. Обе катушки и усилитель 7 образуют эл/мех генератор, чатота колебаний к-ого определяется плотностью анализируемой ж-сти. Диапазон измерения плотности 690-1050кг/м3, рабочие температуры ж-сти 10-100оС, абсолютная погрешность ±1,5кг/м3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

