
















координат касательную кривой, и в точке касания получим оптимальные значения k и Ти, при подстановке которых в передаточную функцию АФЧХ разомкнутой системы касается окружности с заданным показателем колебательности.
Передаточная функция объекта выглядит следующим образом:

Рисунок 1.1 – структура заданного объекта
Реакция системы на единичное входное воздействие:
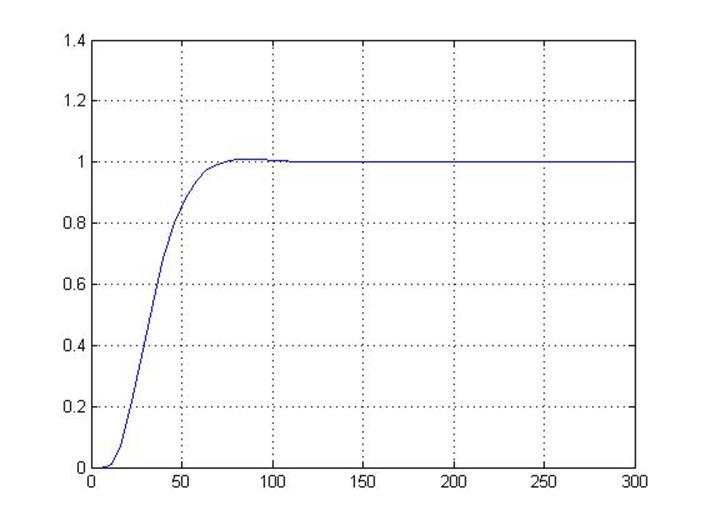
Рисунок 1.2 – реакция объекта на единичное входное воздействие
Рассмотрим синтез П-регулятора как наиболее простого.
Программа в среде MATLAB:
clc
clear all
W1=tf([0.95],[7 1]);
W2=tf([1.1],[150 20 1],'td',7);
Wo=W1*W2
% задаем величину показателя качества
M=1.17;
w=-2:0.01:2;
p=j*w;
C0=1.18;
Wo=1.*exp(-7.*p)./(1050.*p.^3+290.*p.^2+27.*p+1);
Wr=C0;
Ws=Wr.*Wo;
% создаем функции для перехода в комплексную область
Re=real(Ws);
Im=imag(Ws);
% объявляем радиус окружности
R=M/(1-M^2);
R=abs(R);
% C - расстояние от мнимой оси до центра окружности
C=M^2/(1-M^2);
x=-R^2:0.01:R^2;
y1=sqrt(R^2-(x-C).^2);
y2=-sqrt(R^2-(x-C).^2);
% k - тангенс угла наклона касательной к окружности
k=tan(asin(1/M));
% задаем уравнение прямой
y3=k*(x);
figure(1);
plot(Re, Im, x, y1, x, y2, x, y3);
axis([-2 2 -2 2]);
grid on
Построение АФЧХ объекта, окружности и касательной
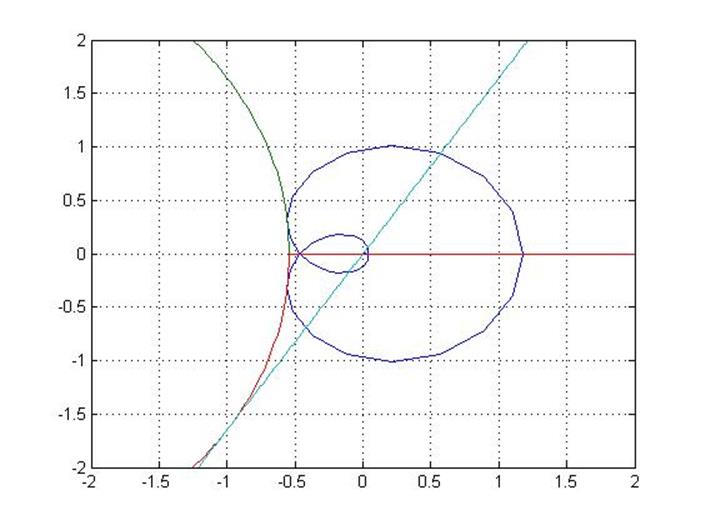
Рисунок 1.3 – АФЧХ объекта
Полученный коэффициент ![]()
Промоделируем работу системы с регулятором в приложении Simulink:

Рисунок 1.4 – структура объекта с П-регулятором
График переходного процесса выглядит следующим образом:
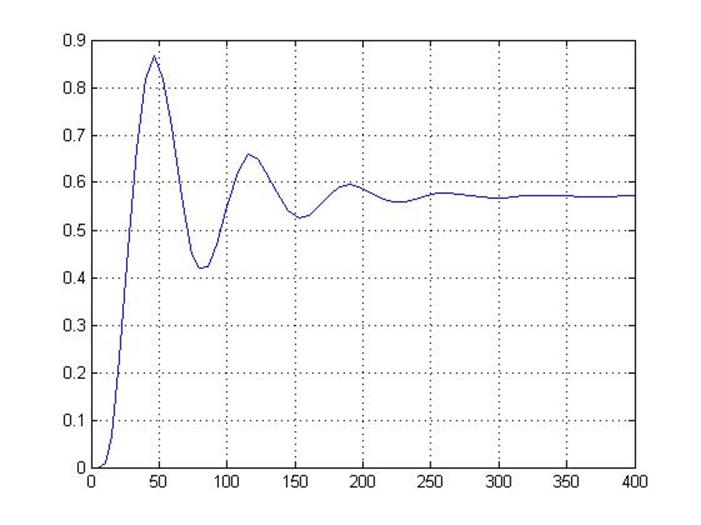
Рисунок 1.5 – переходная характеристика объекта с П-регулятором
В результате чего система достигает перерегулирования σ = 42 %, а установившаяся ошибка превышает ε ≤ 1 %, что удовлетворяет условию курсового проекта. Расчётное время входа системы в допустимые пределы установившейся ошибки – 160 секунда.
Следовательно, P-регулятор не может быть использован.
Рассмотрим синтез ПИ-регулятора.
Программа в среде MATLAB:
clc, clear
% задаем величину показателя качества
M=1.17;
w=-2:0.01:2;
p=j*w;
C0=0.13;
C1=32.2;
Wo=1.*exp(-7.*p)./(1050.*p.^3+290.*p.^2+27.*p+1);
Wr=(C0+C1./p);
Ws=Wr.*Wo;
% создаем функции для перехода в комплексную область
Re=real(Ws);
Im=imag(Ws);
% объявляем радиус окружности
R=M/(1-M^2);
R=abs(R);
% C - расстояние от мнимой оси до центра окружности
C=M^2/(1-M^2);
x=-R^2:0.01:R^2;
y1=sqrt(R^2-(x-C).^2);
y2=-sqrt(R^2-(x-C).^2);
% k - тангенс угла наклона касательной к окружности
k=tan(asin(1/M));
% задаем уравнение прямой
y3=k*(x);
figure(1);
plot(Re, Im, x, y1, x, y2, x, y3);
axis([-5 5 -5 5]);
grid on
Построение АФЧХ объекта, окружности и касательной
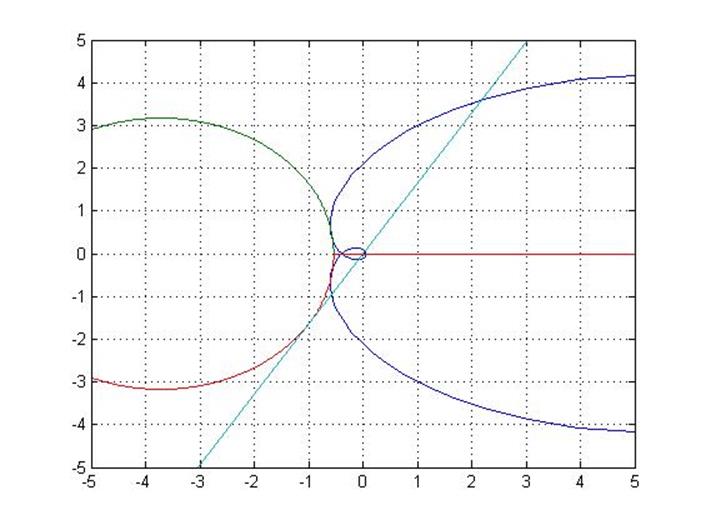
Рисунок 1.6 – АФЧХ объекта
C0=[0.01 0.05 0.08 0.12 0.13 0.12];
C1=[36.8 35.5 34.8 33.6 32.2 31.5];
kp=C0;
Ti=C1;
figure(2)
plot(kp,Ti)
grid on
Расчет коэффициентов регулятора:
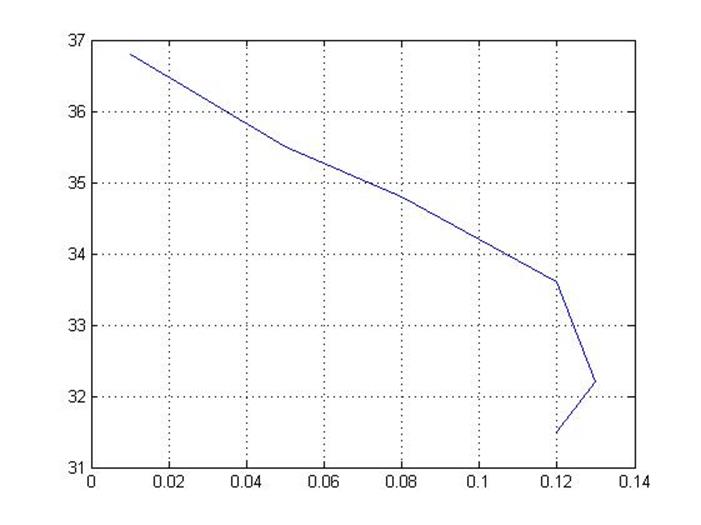
Рисунок 1.7 – нахождение коэффициентов регулятора
Полученные коэффициент ![]()
Промоделируем работу системы с регулятором в приложении Simulink:

Рисунок 1.8 – структура объекта с ПИ-регулятором
График переходного процесса выглядит следующим образом:
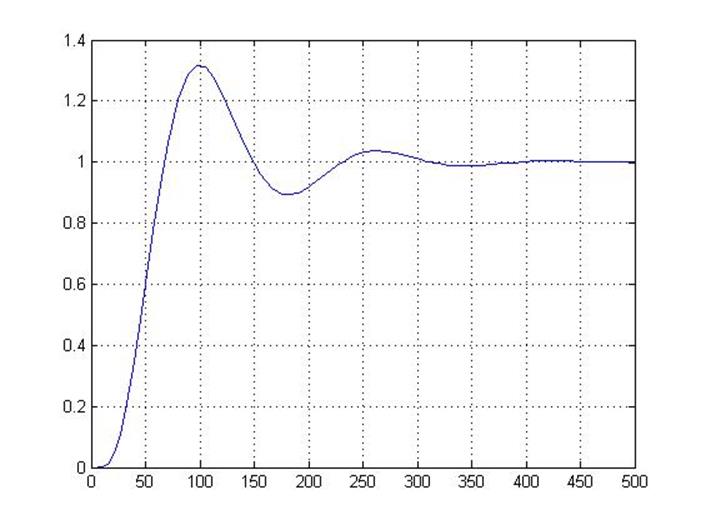
Рисунок 1.9 – переходная характеристика объекта с ПИ-регулятором
В результате чего система достигает перерегулирования σ = 25 %, а установившаяся ошибка не превышает ε ≤ 1 %, что удовлетворяет условию курсового проекта. Расчётное время входа системы в допустимые пределы установившейся ошибки – 212 секунд.
Синтез системы комбинированного регулирования может происходить по частям. Сначала необходимо выполнить синтез замкнутого контура регулирования. Что и было сделано в предыдущей части. Затем необходимо рассчитать компенсирующую цепь: определить чувствительный элемент для изменения возмущения; определить точку включения этой цепи в замкнутый контур; составить условие инвариантности; определить вид и параметры передаточной функции цепи, и элементы для физической реализации цепи.
Компенсирующая цепь включает чувствительный элемент для измерения возмущения и элемент, который создаёт необходимый компенсирующий сигнал. Условием инвариантности регулируемой величины Y от возмущения f является равенство, которое возвращает в ноль передаточную функцию WF .
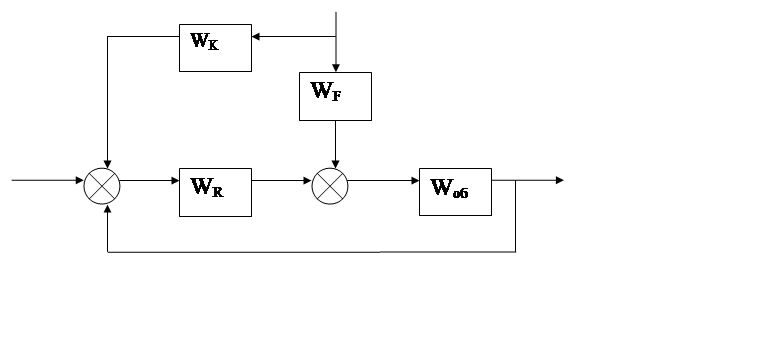
Рисунок 2.1 –схема включения компенсотора
На основании структурной схемы можно записать условие компенсации возмущения:
F*WF – F*WK*WR = 0
Откуда видно, что WF = WK*WR
Тогда WK = WF / WR.
При условии физической реализуемости этого выражения система обеспечивает полную инвариантность выходного сигнала y от возмущения f.
Если расчётная передаточная функция компенсатора физически не реализуется, то необходимо разложить её в ряд:
WK (р) = С0 + С1*р + С2*р2 + …
И ограничиться приведёнными тремя составляющими. В этом случае система будет иметь частичную инвариантность.
Передаточная функция ![]() :
:
Передаточная функция возмущения:
Тогда передаточная функция компенсатора будет равна:
Промоделируем работу системы с данным компенсатором:
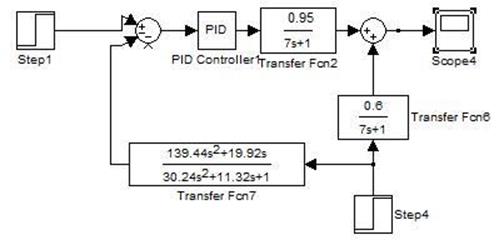
Рисунок 2.2 – структурная схема системы с компенсатором
График переходного процесса по каналу возмущения:
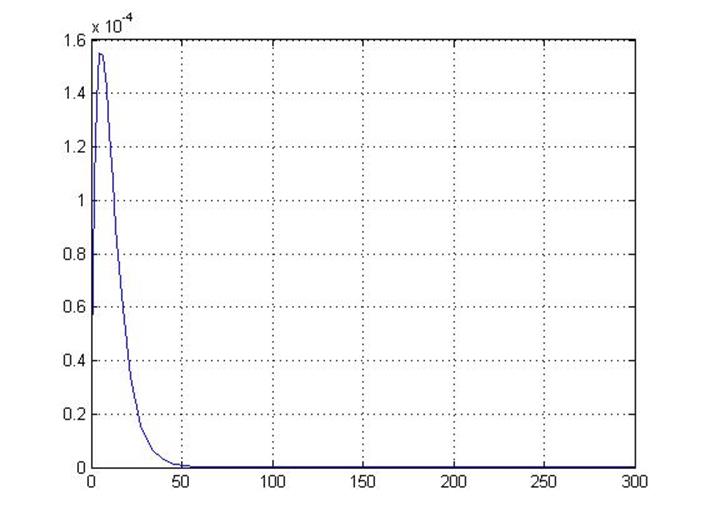
Рисунок 2.3 - переходная характеристика объекта с компенсатором по каналу возмущения
Рассчитанный компенсатор полностью удовлетворяет условию, так как отклонение по каналу возмущения меньше заданного ε ≤ 1 %.
|
|
|
|
|
|
|
|
|
|
|
|
Система с релейным регулятором имеет вид:

Рисунок 3.1 – структура объекта с релейным регулятором
Построим амплитудочастотную и фазочастотную характеристики. Также построим АФЧХ для данной системы.
Программа в среде MATLAB:
clc
clear all
W1=tf([0.95],[7 1]);
W2=tf([1.1],[150 20 1],'td',7);
W=series(W1,W2)
figure(1)
nyquist(W)
figure(2)
bode(W)
grid on
Построение АФЧХ:
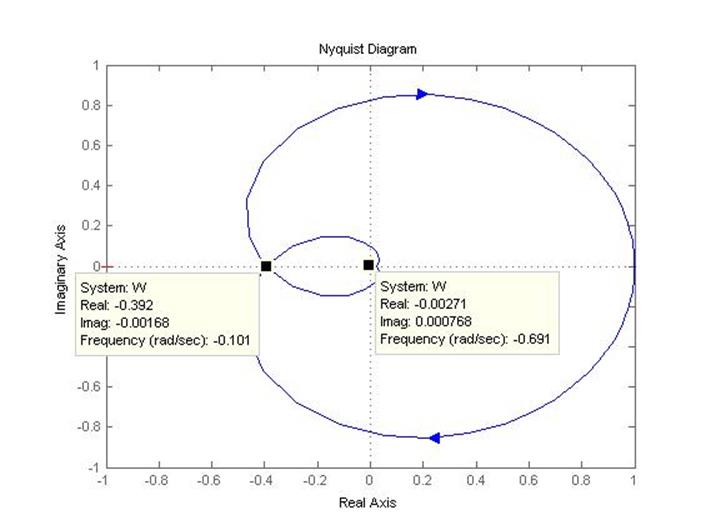
Рисунок 3.2 - АФЧХ
По АФЧХ мы находим 2 точки пересечения графика с действительной осью на отрицательной полуплоскости. С помощью следующих преобразований:

Мы можем найти значения:
С1=0.32 и С2= 0.0022
При подстановке значений найденных при помощи АФЧХ мы получим следующие виды переходных характеристик системы:
Для первого случая:
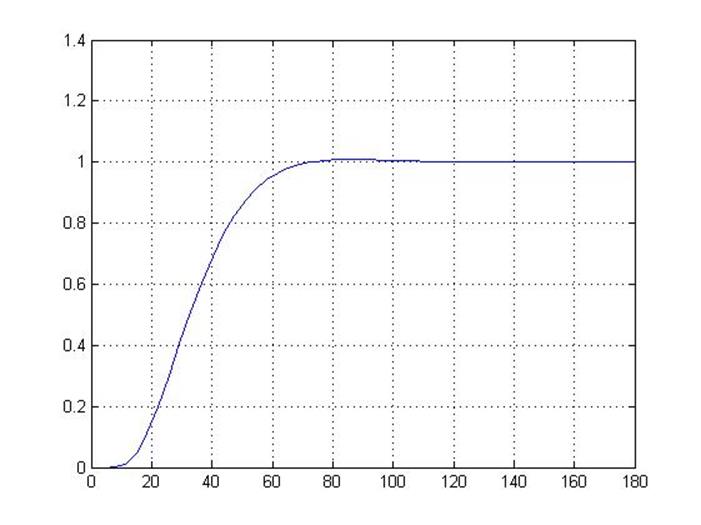
Рисунок 3.3 – переходная характеристика объекта с релейным регулятором (С = 0.32)
Для второго случая:
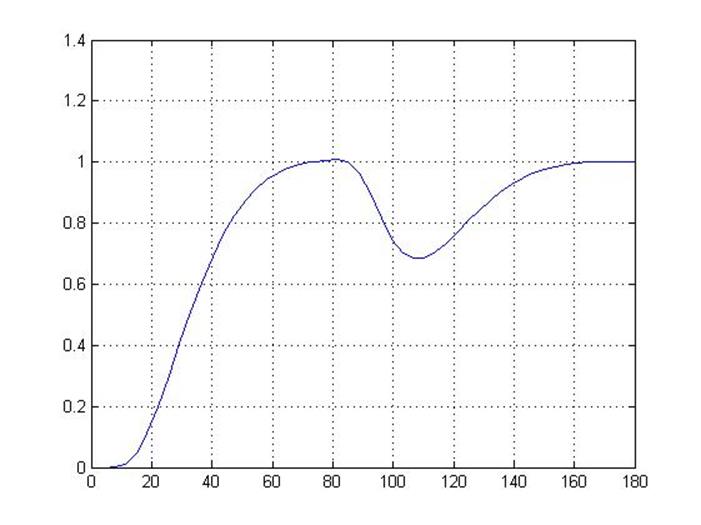
Рисунок 3.4 – переходная характеристика объекта с релейным регулятором (С = 0.00147)
С помощью АЧХ и ФЧХ мы можем найти коэффициент передачи объекта на частоте, при которой фазовый сдвиг равен 180º.
w180 = 0.104 рад/сек.
K180 = 9.15
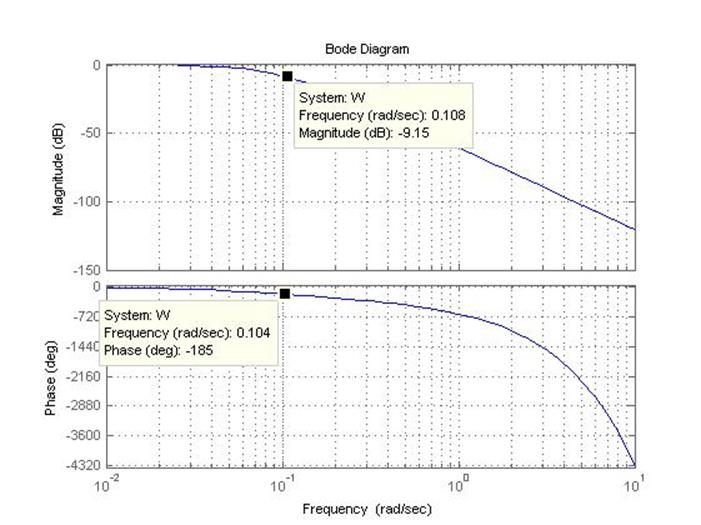
Рисунок 3.5 – АЧХ и ФЧХ
Тогда из формулы:
Мы можем выразить значение ![]() , которое
будет равно:
, которое
будет равно:
![]()
Тогда переходный процесс будет выглядеть следующим образом:
Рисунок 3.6 – переходная характеристика объекта с релейным регулятором (С = 0.0858)
Проанализировав 3 переходные характеристики можно сделать вывод, что при С = 0.0022 система является неустойчивой, при значении С = 0.0858 установившаяся ошибка не превышает ε ≤ 1 %, что удовлетворяет условию курсового проекта, а расчётное время входа системы в допустимые пределы установившейся ошибки – 61 секунда.
Для заданной в условии курсового проекта системы был рассчитан П-регулятор, параметры которого Кп = 1.18. В результате подачи на вход системы единичного воздействия перерегулирование составляет
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.