возникновения их, существенно зависят от параметров системы регулирования.
Методы исследования нелинейных систем:
1) классический (метод фазовых траекторий в фазовых плоскостях);
2) линеаризация нелинейных характеристик.
Получение первым методом зависимостей а и w от параметров систем выше второго порядка слишком сложно.
Основой второго метода является предположение о том, что автоколебания приближенно можно искать в синусоидальной форме.
![]()
где а и w — искомые амплитуда и частота колебаний.
Передаточная функция нелинейного звена выглядит следующим образом:
Величина q называется гармоническим коэффициентом усиления нелинейного звена, а q вводится в том случае, когда у релейного элемента есть зона нечувствительности или гистерезис.
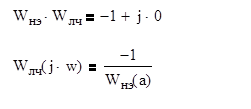
Расчёт параметров автоколебаний производится исходя из критерия устойчивости по Найквисту:
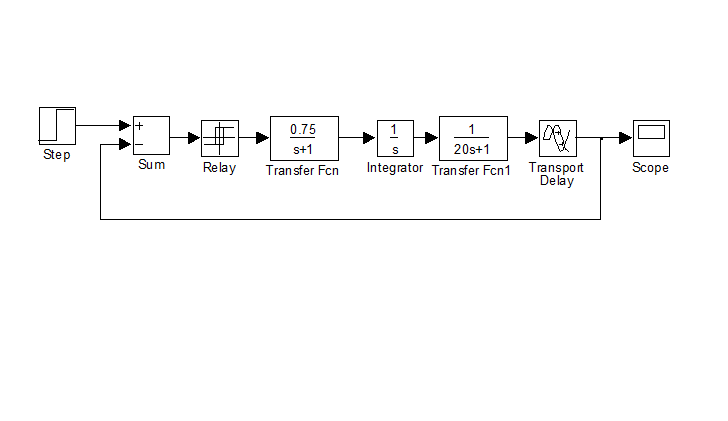
Произведём расчёт системы с релейным регулятором.
В качестве регулятора возьмём реле с идеальной характеристикой без зоны нечувствительности и без гистерезисной петли (для такого реле q(а)=0, q(a)=4*c/(3.14*a)).
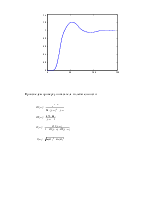
Промоделируем нашу систему, заменив в ней непрерывный регулятор релейным (параметры нелинейного элемента выбираем исходя из максимального значения амплитуды на выходе регулятора).
Из графика определяем параметры автоколебаний:
а=0.344 w=0.06
Произведём расчёт системы с релейным регулятором, используя критерий Найквиста.
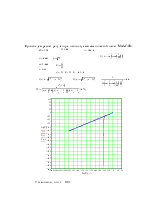
Приведём методику расчёта в пакете MathCAD:
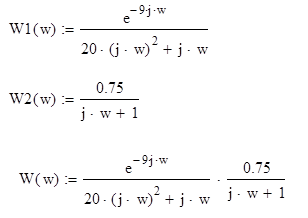

![]()
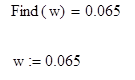
Получили: а=0.358 w=0.065
Полученные значения амплитуды и частоты автоколебаний близки к значениям, найденным графически.
Второй способ расчёта заключается в совместном построении линейной и нелинейной характеристик и в нахождении амплитуды и частоты автоколебаний исходя из точки пересечения кривых. Этот способ даёт приблизительно такие же значения. Исходя из полученных значений можно сделать вывод, что амплитуда и частота автоколебаний системы с релейным регулятором рассчитаны правильно.
При расчёте релейных характеристик с зоной нечувствительности получили, что амплитуды и частоты автоколебаний при небольших значениях этой зоны отличаются незначительно.
Коэффициенты q и q для всех типов релейных звеньев при больших амплитудах сближаются друг с другом, так как роль зоны нечувствительности и гистерезисной петли с увеличением амплитуды в работе реле становится менее заметной.
Проведём гармонической линеаризации релейной характеристики.
Конечно, как всякий приближенный метод, он имеет свои ограничения, вытекающие из его основ, но этот метод очень важен для практических расчетов вследствие следующих своих преимуществ:
1) здесь проще, чем другими методами определяется, будут ли в системе автоколебания или она будет устойчива относительно равновесного состояния;
2) наиболее коротким путем получаются формулы, определяющие непосредственно зависимость амплитуды и частоты автоколебаний от параметров системы;
3) применение метода не ограничивается уравнениями второго порядка, он пригоден для уравнений более высокого порядка не только
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.