МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РБ
БНТУ
НА ТЕМУ:
Проектирование управляемого преобразователя энергии
с датчиками автоматизированного электропривода
ИСПОЛНИТЕЛЬ: Яцкевич А.В.
Гр. 107630Т
РУКОВОДИТЕЛЬ: Гульков Г.И.
МИНСК
2003
СОДЕРЖАНИЕ
1.ПРОЕКТИРОВАНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА.. 3
2. РАСЧЕТ И ПОСТРОЕНИЕ ХАРАКТЕРИСТИК УПРАВЛЕНИЯ СИСТЕМЫ УПРАВЛЕНИЯ ВЕНТИЛЯМИ, ВЕНТИЛЬНОГО КОМПЛЕКТА, УПРВЛЯЕМОГО ПРЕОБРАЗОВАТЕЛЯ.. 8
3.РАСЧЕТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКИХ И ЭЛЕКТРОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА.. 10
4. РАСЧЕТ ЗАВИСИМОСТИ ЕП = F ( t ) ПРИ ИЗМЕНЕНИИ НАПРЯЖЕНИЯ УПРАВЛЕНИЯ ПО ЗАДАННОМУ ЗАКОНУ UУ = F(t). 12
5 РАСЧЕТ ПАРАМЕТРОВ РЕГУЛЯТОРОВ ТОКА И СКОРОСТИ, И ПРИНЦИПИАЛЬНЫЕ СХЕЫ... 14
6. РАСЧЕТ ПАРАМЕТРОВ ДАТЧИКА КООРДИНАТ ЭЛЕКТРОПРИВОДА И ПРОЕКТИРОВАНИЕ ЕГО ПРИНЦИПИАЛЬНУЮ СХЕМУ.. 17
ЗАКЛЮЧЕНИЕ.. 22
СПИСОК ЛИТЕРАТУРЫ... 23
Для электродвигателя 2ПБ180LУХЛ4 из справочника /1/ выписываем следующие данные:
· номинальная мощность Рн, кВт 4.2;
· номинальное напряжение Uн, В 220;
· кпд hн, % 81.5;
· номинальная частота вращения nн, об/мин 750;
·
сопротивление обмотки якоря ![]() , Ом 0,378;
, Ом 0,378;
·
сопротивление обмотки добавочных
полюсов ![]() , Ом 0,263;
, Ом 0,263;
·
индуктивность якорной цепи ![]() , Гн 0,015;
, Гн 0,015;
· момент инерции якоря J, кг*м² 0,23;
Рассчитаем номинальный ток якоря:
 A.
A.

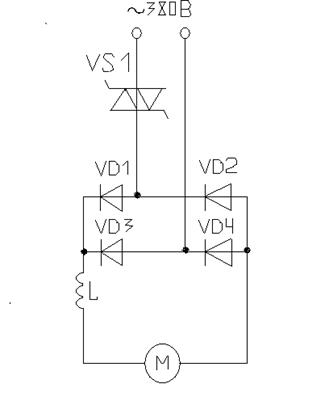
Рисунок1.1. Принципиальная схема силовой цепи управляемого преобразователя.
Рисунок 1.2 Функциональная схема ЭП
Выбор анодного реактора.
 ,где
,где
![]() -коэффициент,учитывающий
наличие свободной составляющей в токе короткого замыкания
-коэффициент,учитывающий
наличие свободной составляющей в токе короткого замыкания ![]() =1.6-2.0;
=1.6-2.0;
![]() -ударный
ток который может протекать по прибору в течении 10с,принимаем приблизительно
равным 7-10 от
-ударный
ток который может протекать по прибору в течении 10с,принимаем приблизительно
равным 7-10 от ![]() ;
;
n-количество реакторов,ограничивающих ток к.з.;
![]() -угловая
частота питающей сети
-угловая
частота питающей сети
Примем анодный реактор РТСТ-41-1,01У3 со следующими данными:
Iн=40А DP=35Вт
Lн=15мГн m=23кг
Определим минимальную скорость двигателя:
Рассчитаем углы открывания
![]()

amin=
Для нижнего диапазона регулирования скорости при D = 10
amax=
Амплитуда первой гармоники:

Сопротивление якорной цепи:
![]()
Амплитуда тока первой гармоники:
Коэффициент пульсаций:
Т.к. КПЗ < 0,07, то в цепь якоря необходимо установить сглаживающий реактор, индуктивность которого найдем решая обратную задачу.
![]()

LP = LЯЦ - LЯ -Lap=0,11 – 0,015-0,0011 = 0,094Гн
Выберем сглаживающий реактор типа ДФ-7 со следующими параметрами:
Iн = 25 А R = 0,056 Ом L = 100 мГн DPн = 35 Вт
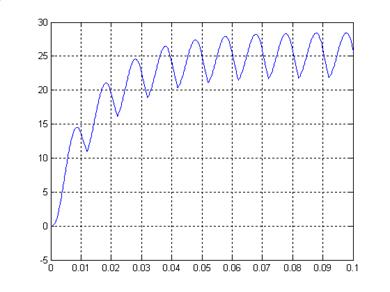
На основании расчетов, применив пакет SimuLink системы MATLAB, произведем расчет переходных процессов в электродвигателе при изменении напряжения управления на входе СИФУ по заданному закону.
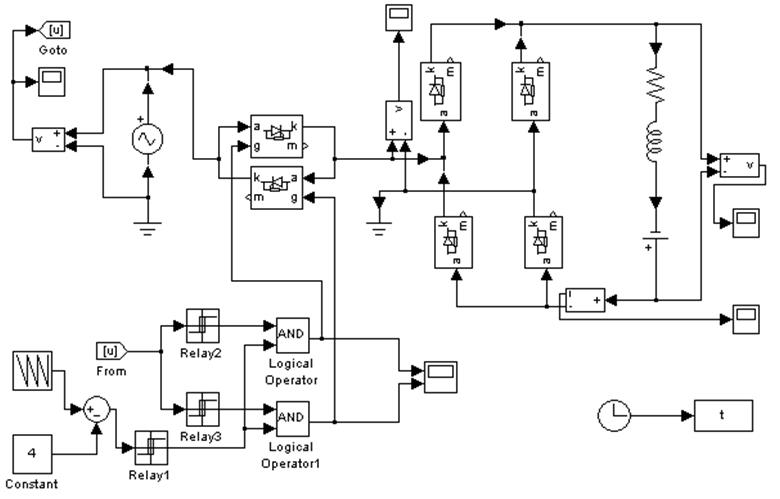
рис. 1.2. Расчетная модель
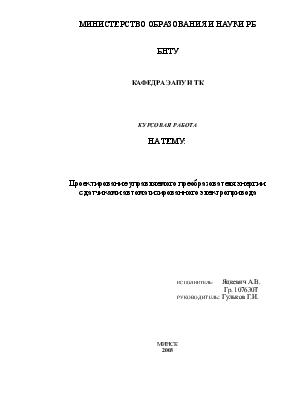
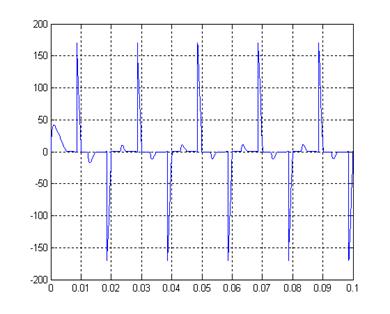
Графики при номинальной скорости вращения 78.5 рад/с(ея = 211В;α = αо =73,3;Uз=2.96)
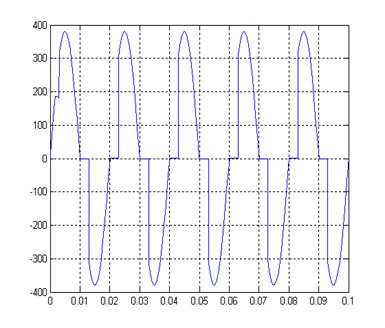
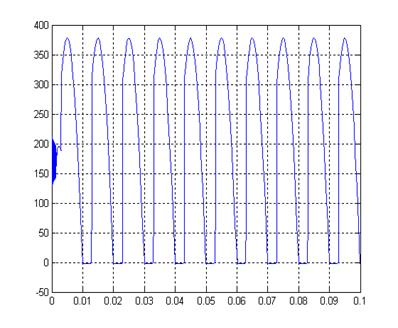
а)Зависимость f = E(t); б) Зависимость f = Uдв(t);
Графики при минимальной скорости вращения 7.85рад/с(eя = 20,5В; α = 150,6)
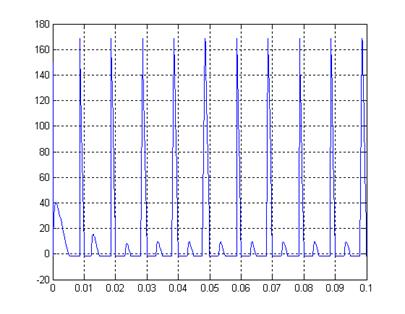
Ток якоря двигателя
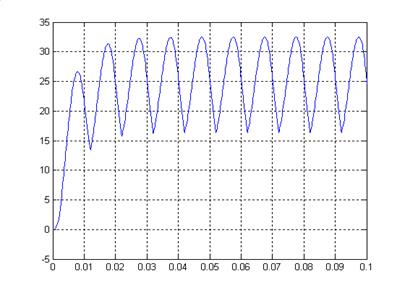
а)без индуктивности сглаживающего дросселя б)с индуктивностью
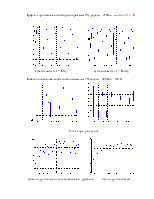
Характеристикой управления вентильного комплекта называется зависимость постоянной составляющей выпрямленной ЭДС Е от угла открывания a. Определим эту зависимость:
 , (2.1)
, (2.1)
Построим зависимость Е
= f(a) при изменении угла a от 0 до ![]() p.
p.

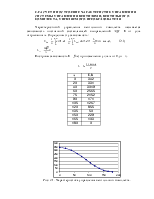
![]()
|
|
E,B |
|
0 |
342 |
|
20 |
331 |
|
40 |
301.9 |
|
60 |
256.5 |
|
75 |
215.2 |
|
90 |
171 |
|
105 |
126.7 |
|
120 |
85.5 |
|
135 |
50 |
|
150 |
22.9 |
|
165 |
10.3 |
|
180 |
0 |
Рис. 2.1. Характеристика управления вентильного комплекта.
Характеристика управления СИФУ – это зависимость
угла открывания a от напряжения
управления, то есть ![]() .
.
СИФУ осуществляет преобразования напряжения управления в фазу открывающего импульса (и формирование импульса). Данное преобразование осуществляется с помощью компаратора, который сравнивает два напряжения – опорное и управляющее.
Опорное изменяется синхронно с напряжением сети, напряжение управления является выходным сигналом регулятора тока.
Исходными данными для расчета характеристики является вид опорного напряжения – отрицательное пилообразное.
Определим напряжение смещения, исходя из того, что
для однофазной мостовой схемы начальный угол ![]() при Uу=0:
при Uу=0:
![]()
 , где
, где
Uпм = -10 В –амплитуда отрицательного пилообразного напряжения.

![]()
Характеристика управления СИФУ строится согласно выражению:
Таблица 3.Характеристика управления СИФУпри отрицательном пилообразном напряжении
|
Uу, В |
5 |
4 |
3 |
2 |
1 |
0 |
|
a,град |
0 |
36 |
72 |
108 |
144 |
180 |
Электромеханической характеристикой называется зависимость среднего значения скорости электродвигателя от среднего значения тока якоря. Для режима непрерывного тока эта зависимость имеет вид:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.