 (3.1)
(3.1)
где

Используя формулы (3.1)-(3.3) построим электромеханические характеристики для углов:
![]() или 1,28рад;
или 1,28рад;
![]() или 2,63рад;
или 2,63рад;
Таблица 3.1
|
a=1,28 |
IЯ, А |
0 |
23,46 |
|
w, c-1 |
84.3 |
78.5 |
|
|
a=2,63 |
IЯ, А |
0 |
23,46 |
|
w, c-1 |
8.43 |
2.67 |
рис.3.1 Электромеханические характеристики
Механической характеристикой электродвигателя это
зависимость среднего значения скорости от среднего значения момента
электродвигателя. Механическую характеристику получим, если в формулы (3.1) и
(3.2) подставим: . Тогда:
. Тогда:
Таблица 3.2
|
a=1,28 |
М, Н×м |
0 |
61.25 |
|
w, c-1 |
84.3 |
78.5 |
|
|
a=2,63 |
w, c-1 |
0 |
61.25 |
|
М, Н×м |
8.43 |
2.67 |
рис.3.2 Механические характеристики
Расчет зависимости ЕП = f ( t ) произведем для изменения напряжения управления по закону:
![]() (4.1)
(4.1)
где t = 0,55с.
Подставив зависимость напряжения управления от времени (4.1) в выражение (2.3) получим зависимость ЭДС выпрямителя от времени (4.2):
 (4.2)
(4.2)
Результат расчета зависимости ЕП = f ( t ) в интервале t = 0 ¸ 0,5 с по формуле (4.2) представлен в таблице 4.1.
Зависимости UУ(t) и Е(t) показаны соответственно на рис.4.1 и 4.2.
|
t |
E |
|
0 |
410,4 |
|
0,05 |
374,7365 |
|
0,1 |
342,1722 |
|
0,15 |
312,4377 |
|
0,2 |
285,2871 |
|
0,25 |
260,4958 |
|
0,3 |
237,8589 |
|
0,35 |
217,1892 |
|
0,4 |
198,3156 |
|
0,45 |
181,0821 |
|
0,5 |
165,3462 |
Рис. 4.1 Зависимость Е(t)
|
t |
Uу |
|
0 |
6 |
|
0,05 |
5,478604 |
|
0,1 |
5,002518 |
|
0,15 |
4,567802 |
|
0,2 |
4,170864 |
|
0,25 |
3,808419 |
|
0,3 |
3,47747 |
|
0,35 |
3,17528 |
|
0,4 |
2,89935 |
|
0,45 |
2,647399 |
|
0,5 |
2,417342 |
Рис. 4.2 Зависимость UУ(t)
Суммарная индуктивность якорной цепи:
Lяц = 0,11 Гн.
Суммарное сопротивление якорной цепи:
RЯЦ =1,2× (RЯО + RДП )= 1,2×0,641 = 0,769 Ом
Электромагнитная постоянная времени:
 с;
с;
![]() ;
;
![]() мкФ;
мкФ;
 кОм;
кОм;


![]() ;
;
следовательно
рис.5.1. Структурная схема контура тока
 ;следовательно
;следовательно
![]()

где UДТМ – максимальное выходное напряжение датчика тока, UДТМ=1,8В.
По результатам расчетов принимаем:
Rот - МЛТ-0,125-150 кОм ±5%;
Rзт - МЛТ-0,125-150 кОм ±5%;
Rоу - МЛТ-0,125-150 кОм ±5%;
С1 - К75–10–250В–0,1мкФ±10%.
Усилитель DA1 реализуем на микросхеме К554УД2А.
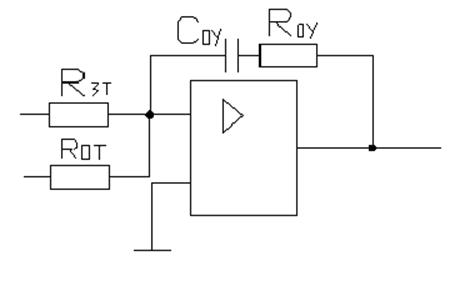
рис.5.2 Принципиальная схема контура тока
Для обеспечения большей точности в нижней части диапазона регулирования регулятор скорости выполним пропорционально – интегральным с передаточной функцией:
WРС ( р ) =  .
.
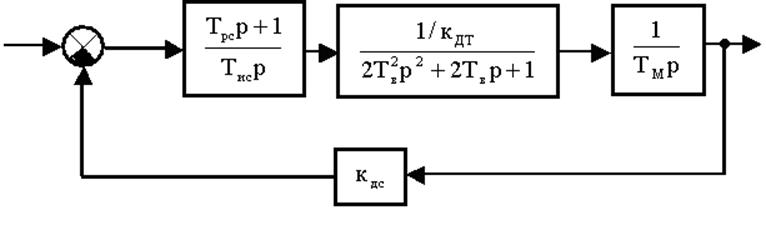
Рис.5.3 Структурная схема контура скорости
Постоянная времени регулятора скорости:
Трс =8×Тв =8×0,02 = 0,16 с.
Жесткость статической характеристики:
bс = В²×с²/рад²×Ом.
В²×с²/рад²×Ом.
Электромеханическая постоянная времени:
Постоянная интегрирования регулятора скорости:
Тис
= , где Кдс
– коэффициент передачи датчика скорости, Кдс =0,0312.
, где Кдс
– коэффициент передачи датчика скорости, Кдс =0,0312.
 c.
c.
Т1 – период питающего напряжения, Т1 = 20 мс.
Тис
= с.
с.
Но в тоже время ТРС =R3*C1 и ТИС =R1*C1. Приняв С1 = 1,5мкФ:



По результатам расчетов принимаем:
R1 - МЛТ-0,125-150 кОм ±5%;R2 - МЛТ-0,125-24 кОм ±5%;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.