R3 - МЛТ-0,125-110 кОм ±5%;С1-К75–10–250В–1,5мкФ±10%.
Усилитель DA2 реализуем на микросхеме К554УД2А.
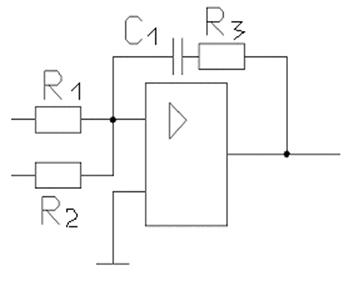
Рис.5.4 Принципиальная схема регулятора скорости
![]() Ом
Ом
Так как нам необходимо получить ![]() мы
выбираем
мы
выбираем ![]() и руководствуясь этим значением
рассчитаем
и руководствуясь этим значением
рассчитаем ![]() .
.
Из выражения  выразим
выразим ![]()
 Ом
Ом
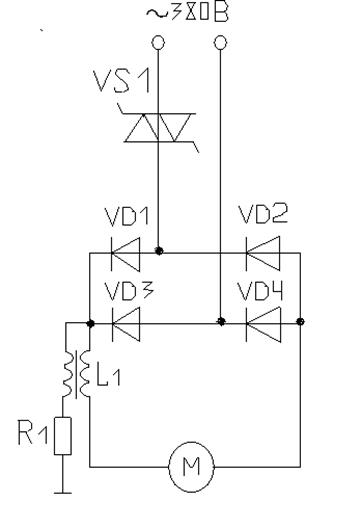
Рис.6.2. Схема электронной защиты вентилей по току.
Рассчитаем делитель напряжения R3,R4.
Для них верно равенство
R4/(R3+R4) = Uд.т.у/Uп
Принимаем R4 =3.3 кОм, тогда
R3 = (Uп/Uд.т.у -1)×R4 = (10 / 3,6-1)× 3300 = 13кОм.
Принимаем R3 =15 кОм.
Принимаем входные резисторы МС R1,R5 = 5.1 кОм.
Ток диода VD1 Iд = Uоу/R5 =10/5100 = 2 мА.
Из справочника выбираем диод типа КД 519 А.
Перечень элементов схемы (рис.6.2)
|
Поз. обозначение |
Наименование |
Кол. |
|
Диод |
||
|
VD1 |
КД519А |
1 |
|
Микросхема |
||
|
А1.1 |
К140УД7 |
1 |
|
Резисторы |
||
|
R1,R5 |
МЛТ-0.125-5.1кОм±5% |
2 |
|
R2 |
МЛТ-0.125-10кОм±5% |
1 |
|
R3 |
МЛТ-0.125-15кОм±5% |
1 |
|
R4 |
МЛТ-0.125-3.3кОм±5% |
1 |
6.3. Проектирование датчика скорости
В данной работе используется в качестве датчика скорости - тахогенератор типа ТГП-3А со следующими параметрами:
- номинальная нагрузка, кОм – Rн=3;
- номинальная частота вращения, об/мин – nн=750;
- крутизна характеристики, мВ/(об/мин) – S=4;
- нелинейность, % – Н=5;
 |
Рис.4.4. Схема датчика скорости на основе тахогенератора.
Для расчета необходимой емкости фильтра необходимо задаться постояной времени: Тф=0,003
Зададимся емкостью с=0,63 мкФ
Тогда  Ом. Примем =5.1кОм
Ом. Примем =5.1кОм
Примем конденсатор К75-10-250В-0,63 мкФ±5%.
- коэффициент пульсаций, % – kпул=10.
Максимальное выходное напряжение тахогенератора составит
![]() . (4.4.1)
. (4.4.1)
Так как максимальное выходное напряжение значительно меньше 10 в (напряжение обратной связи, используемое в С.У.), то целесообразно применение усилителя на основе операционного усилителя (О.У.). Выберем О.У. серии К140 УД 6 со следующими параметрами:
-I вх =0,1 А.
-Uвых = 11 В.
Т.к. коэффициент усиления k = 3 = ![]() , то зададимся R2 = 10 кОм, а R3
соответственно будет 30 кОм.
, то зададимся R2 = 10 кОм, а R3
соответственно будет 30 кОм.
Таблица 4.4. Перечень элементов датчика скорости.
|
Позиционное обозначение |
Наименование |
Кол. |
Примечание |
|
Конденсаторы |
|||
|
С1 |
К75-10-250В-0,63 мкФ±5% |
1 |
|
|
Резисторы |
|||
|
R1 |
МЛТ-0,125-5,1 кОм±5% |
1 |
|
|
R2 |
МЛТ-0,125-10 кОм±5% |
1 |
|
|
R3 |
МЛТ-0,125-30 кОм±5% |
1 |
|
|
Усилители |
|||
|
DA1 |
К140УД6 |
1 |
|
|
Прочие изделия |
|||
|
BR1 |
ТГП-3А |
1 |
Датчиком положения является вращающийся трансформатор. Схема датчика и системы преобразования сигнала в прямоугольные импульсы
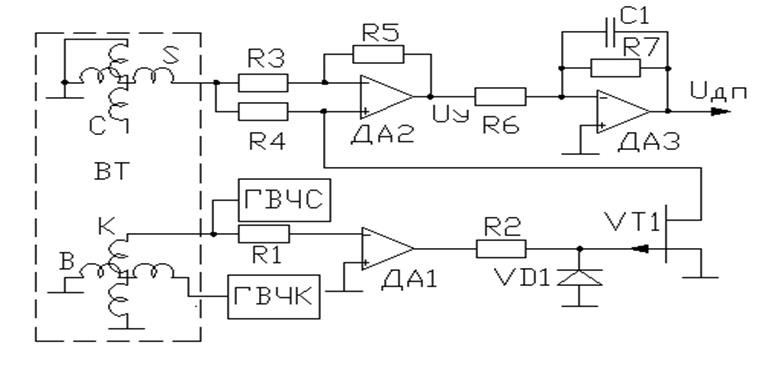
Рис.6.5.Схема датчика положения на основе фазочувствительного выпрямителя .
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.