1 ФІЗИЧНІ ОСНОВИ КЛАСИЧНОЇ МЕХАНІКИ
Кінематичне рівняння руху матеріальної точки (центра мас твердого тіла) вздовж осі х
х = ¦(t),
де ¦(t) є деяка функція часу
Проекція миттєвої швидкості на вісь х
Vx = dx / dt
Проекція середньої швидкості на вісь х
<Vx> = D x / D t
Проекція миттєвого прискорення на вісь х
ах = dVx / dt
Проекція середнього прискорення на вісь х
< ax> = D Vx / D t
Кінематичне рівняння руху матеріальної точки по колу
j=¦(t) при r = R = const
Модуль кутової швидкості
w=dj/dt
Модуль кутового прискоренняя
e = dw / dt
Зв’язок між модулями лінійних та кутових величин, які характеризують рух точки по колу.
V = wR, at = eR, a n = w2R,
де V - модуль лінійної швидкості;
аt - модуль тангенціального прискорення;
аn - модуль нормального прискорення.
Імпульс матеріальної точки масою m, яка рухається зі швидкістю V, дорівнює
р= mV
Другий закон Ньютона,
dр/dt = F,
де F - результуюча сила.
Сили, які розглядаються в механіці
а) сила пружності
F = - kx,
де k - коефіцієнт пружності;
х - абсолютна деформація;
б) сила тяжіння
P = mg ;
в) сила гравітаційної взаємодії
F = G (m1 m2 )/ r2,
де G - гравітаційна стала;
m1, m2 - маси взаємодіючих тіл;
r - відстань між ними.
г) сила тертя (ковзання)
F = f N,
де f - коефіцієнт тертя;
N - сила нормального тиску.![]()
Закон збереження імпульсу
або для двох тіл ( і = 2)
![]() ,
,
де V1 i V2 - швидкості тіл в початковий момент часу;
U1 та U2 - швидкості тих же тіл в кінцевий момент часу.
Т = mV2 / 2
або
Потенціальна енергія
а) пружнодеформованої пружини
де К - коефіцієнт пружності;
б) гравітаційної
взаємодії![]()
П = - G (m1 m2) / r,
де G - гравітаційна стала;
m1 та m2 - маси взаємодіючих тіл;
r - відстань між ними;
в) тіла, яке знаходиться в однорідному полі сили тяжіння Землі,
П = mgh,
де g - прискорення вільного падіння;
h - висота тіла над рівнем, прийнятим за нульовий ( формула вірна при умові, що h << R - радіуса Землі.)
Закон збереження механічної енергії
Робота А, звершена результуючою силою, визначається як міра змінювання кінетичної енергії матеріальної точки
Основне рівняння динаміки обертального руху відносно нерухомої осі Z.
Mz = Iz . e,
де Mz - результуючий момент зовнішніх сил, які діють на тіло, відносно осі Z;
e - кутове прискорення;
Iz - момент інерції відносно осі обертання.
Момент інерції деяких тіл масою m відносно осі Z, яка проходить через центр маси:
а) стержня довжиною l відносно осі, яка перпендикулярна стержню,
б) обруча ( тонкостінного циліндра) відносно осі, перпендикулярної площині обруча (вісь Z співпадає з віссю циліндра),
Iz= mR2,
де R - радіус обруча (циліндра);
в) диску радіусом R відносно осі, перпендикулярної площині диску
I z= ![]() mR2.
mR2.
Проекція на вісь Z моменту імпульсу тіла Lz, що обертається відносно нерухомої осі Z,
Lz = Iz . wz,
де wz - кутова швидкість тіла.
Закон збереження моменту імпульсу системи тіл відносно осі Z
де wi -кутова швидкість обертання системи тіл навколо осі Z.
Кінетична енергія тіла, яке обертається навколо осі Z,
Т = 1/2 (Iz . v2z) або T = L2z / (2 Iz)
Релятивістська маса
m = ,
,
де mo - маса спокою; V - швидкість частинки; с - швидкість світла; причому повинна виконуватись умова V » c.
Релятивістський імпульс
р = mV =
Енергія релятивістської частинки
Е = mc2 = moc2 + Еk,
де Ек - кінетична енергія частинки; moc2 = Eo - її енергія спокою.
Зв’язок повної енергії з імпульсом релятивістської частинки
p =
Приклад 1. Рівняння руху матеріальної точки вздовж осі х має вигляд
x = A + Bt + Ct3,
де А = 2 м
В = 1 м/с
С = -0,5 м/c2
Знайти координату Х, швидкість Vx та прискорення ах точки в момент часу t = 2 c.
Розв’язання. Координату Х визначимо, якщо підставимо в рівняння руху числові значення коефіцієнтів А, В, С та часу t;
Миттєва швидкість відносно осі Х є перша похідна від координати по часу
Vx = dx/dt = B + 3Сt2
Прискорення точки визначимо, якщо знайдемо похідну від швидкості по часу
ах = dVx/dt = 6Сt
Vx = (1 - 3 . 0,5 . 22) м/с = -5 м/с
ах = 6 (-0,5) . 2 м/с2 = -6 м/с2
Приклад 2. Тіло обертається навколо нерухомої осі за законом
j = A + Bt + Ct2,
де А = 10 рад,
В = 20 рад/с,
С = -2 рад/c2.
Визначити повне прискорення aточки, яка знаходиться на відстані r = 0,1 м від осі обертання, для моменту часу t = 4 с.
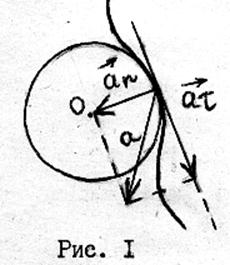 Розв’язання. Повне прискорення a точки,
що рухається по кривій лінії, можна визначити, як геометричну суму
тангенціального прискорення at, направленого
по дотичній до траєкторії, та нормального прискорення аn, що направлене до
Розв’язання. Повне прискорення a точки,
що рухається по кривій лінії, можна визначити, як геометричну суму
тангенціального прискорення at, направленого
по дотичній до траєкторії, та нормального прискорення аn, що направлене до
центру кривини траєкторії (рис.1)
![]()
![]() взаємно перпендикулярні і тому модуль
прискорення дорівнює
взаємно перпендикулярні і тому модуль
прискорення дорівнює
a 
![]() (1)
(1)
Модулі тангенціального та нормального прискорень точок тіла, що обертається, можно визначити за формулами
at= er, a n = w2r,
де w - модуль кутової швидкості тіла,
e- модуль його кутового прискорення.
![]() (2)
(2)
Кутову швидкість w визначимо, якщо візьмемо першу похідну від кута повороту по часу
w=dj/dt = B+2Ct
В момент t = 4 c модуль кутової швидкості
w = 20 +( 2 - 2.4) рад/с = 4 рад/с.
Кутове прискорення знайдемо, якщо візьмемо першу похідну від кутової швидкості по часу
e= dw/dt = 2C = -4 рад/с2
Підставимо значення v, e та r у формулу (2) , будемо мати
a =
0,1 ![]()
Приклад 3. Через блок в вигляді суцільного диску, що має масу m= 80 г,
перекинута тонка гнучка нитка, до кінців якої підвішені тягарці масою m1 = 100г та m2= 200 г (див.рис.2). Визначити прискорення, з яким будуть рухатися тягарці. Тертям та масою нитки знехтувати.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




