Введение
Основные типы и области применения
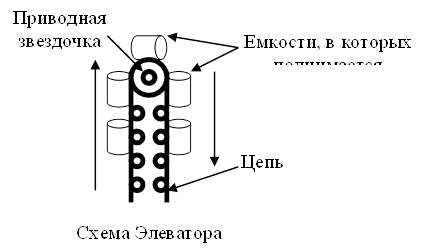
Элеваторы служат для транспортирования насыпных или штучных грузов по вертикальному или крутонаклонному (60–82° к горизонту) направлению и соответственно разделяют на вертикальные и наклонные. По роду грузонесущего элемента элеваторы бывают ковшовые, полочные и люлечные.
Ковшовые элеваторы применяют для перемещения насыпных грузов — пылевидных, зернистых и кусковых (например, цемента, химикатов, песка, зерна, муки, угля, торфа и т.п.) на предприятиях химической, металлургической и машиностроительной (в литейных цехах) промышленности, в производстве строительных материалов и огнеупоров, на углеобогатительных фабриках, в зернохранилищах, пищевых комбинатах и т. п. Их используют только для подъема грузов от начального до конечного пункта без загрузки и разгрузки.
Ковшовые элеваторы разделяют на стационарные и передвижные, транспортные и технологические, например обезвоживающие, у которых груз в процессе транспортирования освобождается от воды.
Люлечные и полочные элеваторы служат для транспортирования штучных грузов — мешков, ящиков, бочек, а также отдельных деталей на складах, базах, магазинах и предприятиях различных отраслей промышленности. Люлечные и некоторые полочные элеваторы могут поднимать и опускать грузы (например, с одного этажа на другой) с промежуточной загрузкой и разгрузкой.
Для вертикального и крутонаклонного транспортирования некоторых насыпных и мелких штучных грузов применяют двухленточные конвейеры-элеваторы, у которых транспортируемый груз зажимается между двумя лентами, а также четырехцепные конвейеры-элеваторы.
 |
1. Расчёт привода элеватора:
Найдем частоту вращения рабочего органа nро :
 ,
,
где V – скорость движения цепи элеватора
D – диаметр приводной звездочки.
Возьмем электродвигатели с частотой вращения:
n1 =1500 об/мин
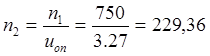
n2 =750 об/мин
n3 =1000 об/мин
Возможное общее передаточное отношение привода uпр рассчитаем по формуле:

Следовательно, для соответствующего двигателя uпр будет равно:
Uпр.1 общ.=1500/7,16=209,5
Uпр.2 общ.= 750/7,16=104,7
Uпр.3 общ.= 1000/7,16=139,7
Мощность на рабочем органе определим по формуле:
![]() , где F – тяговое усилие на элеваторе
, где F – тяговое усилие на элеваторе
![]() Вт
Вт
2. Кинематические схемы привода:
Вариант 1. (Червячный редуктор)
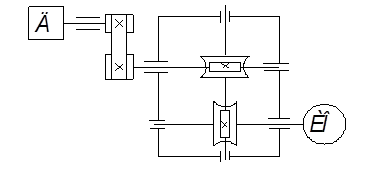
Рис 1
КПД привода на схеме рис.1 равен:
hобщ=hрем*hчер1*hчер2*(h)**4=0.97*0.83*0.83*0.99**4=0.65
Требуемая мощность рассчитывается по формуле:
Рдв=Рио/h=1050/0.65=1615,4 Вт
Вариант 2. (Коническо-червячный редуктор)
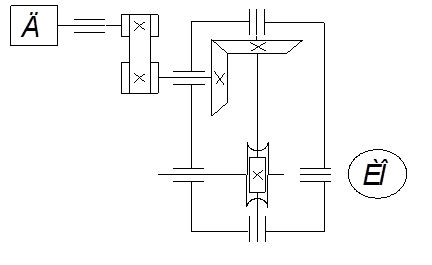
Рис 2
КПД привода на схеме рис.2 равен:
hобщ=hрем*hчер*hкон*(h)**5=0.97*0.83*0.97*0.99**5=0.735
Требуемая мощность рассчитывается по формуле:
Рдв=Рио/h=1050/0.735=1428,6 Вт
Вариант 3. (Червячно-цилиндрический редуктор)
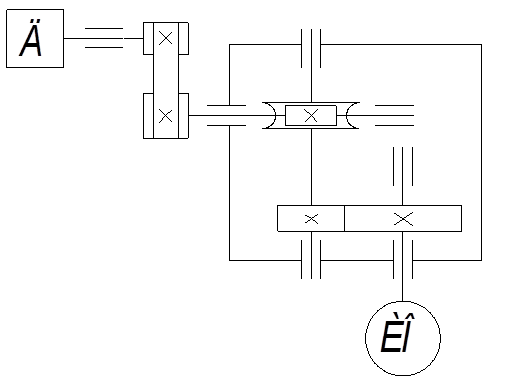
Рис 3
Передаточное число привода равно:
Выберем передаточное отношение для быстроходной ступени
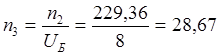
UБ=8
Выберем передаточное отношение для тихоходной ступени UТ=4
Передаточное
отношение редуктора равно ![]()
Тогда передаточное отношение открытой передачи будет равно:
КПД привода на схеме рис.3 равен:
hобщ=hрем*hчер*hцил*(h)**3=0.97*0.97*0.83*0.99**3=0.813
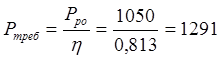
Требуемая мощность рассчитывается по формуле:
![]()
3. Выбор кинематической схемы.
Схема №1
Червячный передача рис.1 является простой в компоновке, достаточно низкая ошибка по передаточному отношению ,но имеет низкий КПД и сложности в настройке червячной передачи.
Схема №2
В данной схеме изображенной на рис.2, простая компоновка, но будет не целесообразно ставить коническое колесо и червяк на один вал, возникнут дополнительные напряжения и сложности с настройкой червяка. Также задействовано верхняя граница передаточного отношения для конической передачи, равное трем, что тоже накладывает свои ограничения.
Схема №3
В
схеме изображенной на рис.3 достаточно низкая ошибка по передаточному
отношению (Dn=0.1 ), высокий КПД (![]() ). Исправлена и проблема настройки
червячной передачи. Все передаточные отношения взяты в срединах рекомендуемых
диапазонов.
). Исправлена и проблема настройки
червячной передачи. Все передаточные отношения взяты в срединах рекомендуемых
диапазонов.
В этой схеме используем электродвигатель со скоростью вращения n=750 об/мин, который имеет относительно малые габаритные размеры.
Ременная передача обеспечивает бесшумность работы.
Червячная передача дает возможность использования больших передаточных чисел. Обеспечивает плавность и бесшумность работы, повышенную кинематическую точность, возможность самоторможения, что позволяет не применять дополнительных устройств торможения.
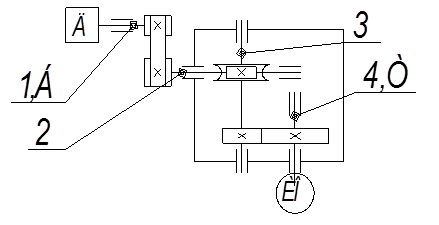
Рис 4, (1,2,3,4 – номера валов; Б – входной вал; Т – выходной вал)
4.Выбор двигателя
Выбираем двигатель 4А112МA8УЗ с номинальной скоростью вращения 750 об/мин и мощностью 1,5 кВт.
Скорости вращения валов и моменты на валах привода.
![]() об/мин
об/мин
 об/мин
об/мин
 об/мин
об/мин
 об/мин
об/мин
 рад/с
рад/с
 рад/с
рад/с
 рад/с
рад/с
 рад/с
рад/с
Момент на первом валу:
 Нм
Нм
Момент на втором валу:
![]() Нм
Нм
Момент на третьем валу:
![]() Нм
Нм
Момент на четвертом валу:
![]() Нм
Нм
5. Выбор материалов.
Выбор материала для зубчатых колес.
Для шестерни сталь 40Х, термообработка – улучшение твердость НВ=217,
для колеса сталь 40Х, термообработка – улучшение, твердость НВ=207.
6. Расчет допускаемых контактных напряжений
 ,
,
SH=1,1 — коэффициент безопасности;
![]() =2HB+70
— предел контактной прочности;
=2HB+70
— предел контактной прочности;
 — коэффициент долговечности;
— коэффициент долговечности;
![]() базовое число циклов;
базовое число циклов;
 — эквивалентное число циклов;
— эквивалентное число циклов;
Ti — момент в данный момент времени;
ni — частота вращения при Ti;
ti — время работы при Ti;
с=1.
Время работы привода рассчитаем по формуле:
где Кс=0,5 —коэффициент суточного использования;
Кг=0,3 — коэффициент годового использования;
L=2 года — время службы привода.
Произведем расчет по вышеуказанным формулам для:
Шестерни:
sнlimШ= 2×217+70=504 МПа
Метод линейной интерполяции: 200-250/10-17=217-200/Х-10 Х=12.38
NноШ=12.38x106

[sH1]=504*1.23/1.1=563,5 МПа
Колеса:
sнlimК= 2×207+70=484 МПа
Метод линейной интерполяции: 200-250/10-17=207-200/Х-10 Х=10.98
NHOК=10.98

[sH2]=484*1,52/1.1=668,8 МПа
7. Расчет допускаемых напряжений изгиба
sf0=1.8HB=391 — предел выносливости зубьев по напряжениям изгиба;
![]() — коэффициент, учитывающий влияние
двустороннего
— коэффициент, учитывающий влияние
двустороннего
приложения нагрузки;
SF = 1,7 — коэффициент безопасности;
![]()
 , но £2 — коэффициент долговечности;
, но £2 — коэффициент долговечности;
![]() — базовое число циклов;
— базовое число циклов;
 — эквивалентное число циклов.
— эквивалентное число циклов.
Произведем расчет по вышеуказанным формулам для:
Шестерни:
sf0ш=1.8*217=391 МПа

[sf]=391*1.2*1*1.03/1.7=284,3 МПа
Колеса:
sf0ш=1.8*207=373 МПа
[sf]=372.6 *1.2*1*1.3/1.7=342,3 МПа
8. Расчет цилиндрической передачи
Межосевое расстояние посчитаем по формуле:

![]() мм
мм
![]() — коэффициент, учитывающий неравномерности
распределения нагрузки по длине контактной линии;
— коэффициент, учитывающий неравномерности
распределения нагрузки по длине контактной линии;
![]() — коэффициент динамической нагрузки;
— коэффициент динамической нагрузки;
![]() — коэффициент, учитывающий неравномерное
— коэффициент, учитывающий неравномерное
распределение нагрузки между зубьями.
 мм
мм
Принимаем ![]() мм, тогда ширина колеса
мм, тогда ширина колеса ![]() мм
мм
8.1 Основные размеры цилиндрической передачи
По
рекомендациям выбираем ![]() , тогда
, тогда  мм,
округляем до m=2,5 мм (1ый ряд).
мм,
округляем до m=2,5 мм (1ый ряд).
Общее
количество зубьев равно: 
Зубьев на
шестерне:  ;
;
Зубьев на
колесе: ![]()
Делительный
диаметр шестерни: ![]() мм
мм
Делительный
диаметр колеса: ![]() мм
мм
Межосевое
расстояние ![]() мм
мм
Диаметр окружности вершин зубьев шестерни:
![]() мм
мм
Диаметр окружности вершин зубьев колеса:
![]() мм
мм
Диаметр
впадин шестерни: ![]() мм
мм
Диаметр
впадин колеса: ![]() мм
мм
Ширина
колеса: ![]() мм. Ширина шестерни:
мм. Ширина шестерни: ![]() мм
мм
8.2 Проверка прочности по контактным напряжениям:

Из условию прочности:
574,77 >563,5

Перегрузка допускается в пределах 5%
Условие прочности выполняется.
8.3 Проверка прочности по напряжениям изгиба:
Проверку выполняем
по тому из колес, для которого меньше отношение ![]()
Расчет ведем для шестерни.
KFβ=1,05 — коэффициент, учитывающий угол наклона валов;
KFV=1,01 — коэффициент динамической нагрузки;
KF=KFb×KFV=1,05×1,01=1,06.
Подставим эти значения в формулу:
 МПа
МПа
По условию прочности: sF<[sF]
Отмечаем, что для данной пары колес основным критерием работоспособности является сопротивление усталости по контактным напряжениям, а не изгибным.
Геометрия цилиндрической передачи на рис.5
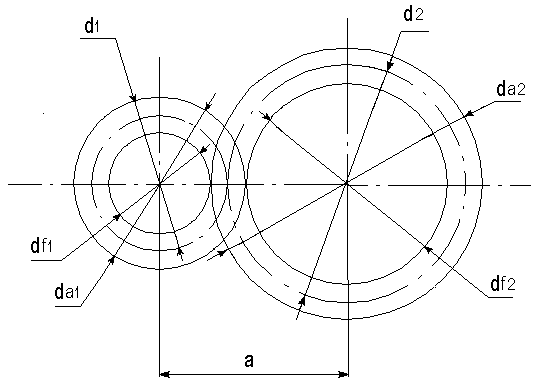 |
Рис 5 Геометрия цилиндрической передачи
9. Расчет червячной передачи
Расчет червячной передачи ведется по червячному колесу.
Предварительно
по рекомендациям выбираем ![]() , тогда
, тогда![]() >28
(
>28
(![]() )
)
Материал для венца колеса выбирается по скорости скольжения:
![]() м/с
м/с
При такой скорости возможен выбор серого чугуна марки СЧ18, как материала для колеса, но я выбираю бронзу БрО10Ф1, чтобы исключить возможность литейного брака, предел прочности, для этой бронзы, sВ = 260 МПа, предел текучести sТ=150 МПа.
Предварительно назначаем q=10 из условия жесткости и компактности
 , подходит (должно быть 0,22<
, подходит (должно быть 0,22<![]() <0,4)
<0,4)
9.1 Расчет допускаемых контактных напряжений:

![]()
![]()
9.2 Расчет допускаемых напряжений изгиба:
![]()
![]()

![]() МПа
МПа
9.3 Расчет червячной передачи
Тогда межосевое расстояние будет считаться по формуле:
 мм
мм
Принимаем ![]() , тогда
, тогда  , M=6
, M=6
Величина коэффициента смещения

Определяем диаметры червяка и колеса:
Делительный диаметр червяка: d1=q×m=10×6=60 мм
Делительный диаметр червячного колеса: d2=z2×m=32×6=192 мм
Проверяем выбранное значение Vск
 ,где
,где
Угол подъема
винтовой линии:  ; g=21.8рад
; g=21.8рад
 , тогда
, тогда
 ,материал оставляем.
,материал оставляем.
9.4 Проверка на прочность по контактным напряжениям
 — приведенный модуль упругости, где Е1
= 2,1×105 МПа – модуль
упругости для стали; Е2 = 0,9×105
МПа – модуль упругости для бронзы;
— приведенный модуль упругости, где Е1
= 2,1×105 МПа – модуль
упругости для стали; Е2 = 0,9×105
МПа – модуль упругости для бронзы; ![]() МПа;
МПа;
x =0,75 — коэффициент, учитывающий уменьшение длины контактной линии;
d =0,8727 рад — угол обхвата;
KH=KF=Kb×Ku ;
Ku=1 — коэффициент динамической нагрузки;
Kb=1,12 ×— коэффициент концентрации нагрузки;
 ;
;
 МПа
МПа
По условию прочности
![]()
171,31Мпа £178,95МПа

Условие прочности выполняется.
9.5Проверка на прочность по напряжениям изгиба
 Н
Н
![]() мм;
мм;
По
эквивалентному числу зубьев колеса  выбираем YF=3,9;
выбираем YF=3,9;
 МПа
МПа
По условию
прочности ![]()
31,46Мпа £51,19МПа
Условие прочности выполняется.
9.6 Основные размеры червячной передачи
Диаметр вершин червяка: da1= d1+2m=60+2*6=72 мм
Диаметр впадин червяка: df1= d1–2,4m=60–2,4*6=45,6 мм
Длина нарезки червяка: b1=(10,5+Z1)m+25=112мм
Диаметр
вершин червячного колеса: ![]() мм
мм
Диаметр
впадин червячного колеса: ![]() мм
мм
Ширина червячного колеса: b2=0,75 da1 =54мм
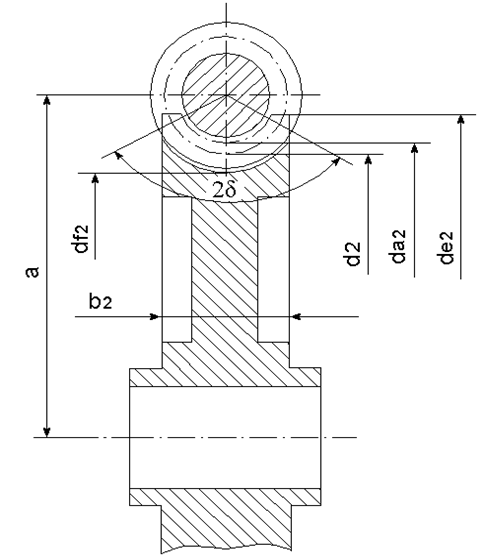 |
Рис.6. Геометрия червячного колеса
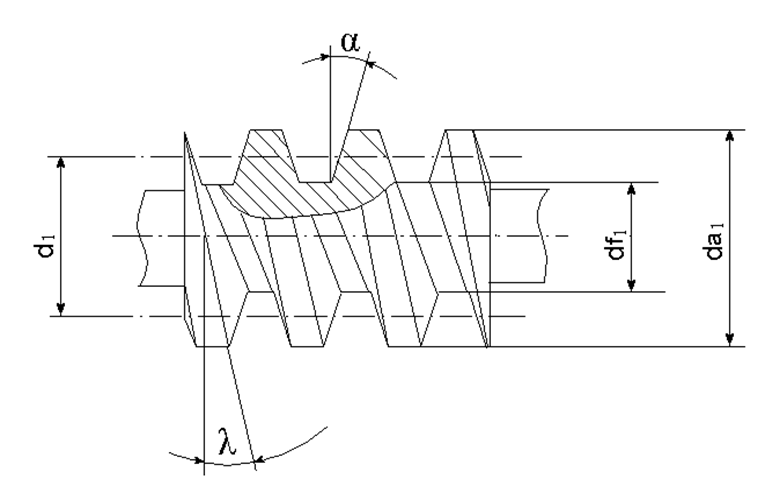 |
Рис.7. Геометрия червяка
10. Предварительный расчет валов
Быстроходный вал:
 мм, увеличиваем на 5% и округляем
мм, увеличиваем на 5% и округляем ![]()
dп=25 мм под подшипник, диаметр бортика 30 мм.
Промежуточный вал:
 мм, увеличиваем на 5% и округляем
мм, увеличиваем на 5% и округляем ![]()
dп=45 мм под подшипник, диаметр бортика 55 мм, под колесо 50 мм.
Выходной вал:
 мм, увеличиваем на 5% и округляем
мм, увеличиваем на 5% и округляем ![]()
dп=65 мм под подшипник, диаметр бортика 75 мм, под колесо
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.