Примеры пользования таблицей.
1. Найти инволюту угла a = 23°10′. По таблице находим inv 23°10′ = 0,023577.
2. Найти инволюту угла 22°18′. По таблице находим inv 22°15′ = 0,020776 и inv 22°20′ = 0,021019; табличная разность составляет 0,000243 на 5′; дополнительная величина инволюты равна 0,000244 ∙ 3/5 = 0,000146. Следовательно, inv 22°18′ = 0,020776 + 0,000146 = 0,020922.
3. Найти угол a по inva = 0,031188. Ближайшие табличные значения: inv 25°15′ = 0,030935; inv 25°20′ = 0,031260. Табличная разность 0,000325 на 5′. На 1′ в этом интервале приходится 0,000065. Наиболее близко к заданному 0,031260 – 0,000065 = 0,031195, что соответствует углу a = 25°19′.
Продолжение прил. Б
Окончание прил. Б
1. Артоболевский И.И. Теория механизмов и машин. Учебник: М., 1975. 639 с.
2. Алгоритмы к программам по теории механизмов и деталям машин: Метод. указ. / Б.В. Глухов, Б.Е. Татаринцев. Новосибирск, 1991. 97 с.
3. Глухов Б.В. Курс теории механизмов и машин: Учеб. пособие. Новосибирск, 2006. 380 с.
4. Глухов Б.В., Бондаренко А.Н. Динамический синтез рычажного механизма двигателя внутреннего сгорания: Метод. указ. Новосибирск, 2000. 42 с.
5. Глухов Б.В., Бондаренко А.Н. Проектирование кулачковых механизмов: Учеб. пособие. Новосибирск, 2002. 102 с.
6. ГОСТ 2.770-68. Обозначения условные графические в схемах. Элемен-ты кинематики.
7. ГОСТ 16530-83. Передачи зубчатые. Термины, определения и обозна-чения.
8. ГОСТ 16531-83. Передачи зубчатые цилиндрические. Термины, опре-деления и обозначения.
9. ГОСТ 16532-70. Передачи зубчатые цилиндрические эвольвентные внешнего зацепления. Расчет геометрии.
10. Кинематический анализ и синтез зубчатых механизмов: Метод. указ. / Сост. Б.В. Глухов. Новосибирск, 1986. 16 с.
11. Лёзин Д.Л., Ришко Ю.И. Теория механизмов и машин. Зубчатые механизмы: Курс лекций. Новосибирск, 2004. Ч. III. 89 с.
12. Методические указания к выполнению курсового проекта по теории механизмов и механике машин: Метод. указ. / Сост. Б.В.Глухов, Б.Е. Татаринцев. Новосибирск, 1994. 49 с.
13. Попов С.А. Курсовое проектирование по теории механизмов и ме-ханике машин: Учеб. пособие. М., 1986. 295 с.
14. Синтез зубчатых механизмов с использованием ЭВМ / Сост. Б.В. Глухов. Новосибирск, 1986. 19 с.
15. Структурный, кинематический и кинетостатический анализ плоских шарнирных механизмов: Метод. указ. / Сост. Б.В. Глухов, Б.Е. Татаринцев. Новосибирск, 1994. 49 с.
16.Теория механизмов и машин: Учебник / Под ред. К.В. Фролова. М., 1987. 496 с.
ОГЛАВЛЕНИЕ
Введение
1. Содержание курсового проекта
2. Задания на курсовой проект
3. Структурный анализ рычажного механизма
4. Кинематический анализ рычажного механизма
4.1. Планы положений
4.2. План скоростей
4.3. План ускорений
4.4. Кинематические диаграммы
4.5. Аналитические методы кинематического анализа
4.5.1. Общие положения
4.5.2. Кривошипно-ползунный механизм
4.5.3. Кривошипно-коромысловый механизм
4.5.4. Кривошипно-кулисный механизм
5. Кинетостатический анализ рычажного механизма
5.1. Задачи и методы кинетостатического анализа
5.2. Силовой расчет диады 2-3
5.3. Силовой расчет диады 4-5
5.4. Силовой расчет начального звена
5.5. Расчет мощностей
5.6. Аналитические методы
6. Содержание первого листа курсового проекта
7. Расчет маховика
7.1. Задачи динамического анализа
7.2. Краткие теоретические сведения
7.3. Диаграммы сил и приведенных моментов
7.4. Графическое интегрирование
7.5. Диаграммы работ и энергий
7.7. Определение момента инерции маховика методом Н.И. Мерцалова
7.8. Алгоритм расчета момента инерции маховика
7.9. Определение угловых скоростей и угловых ускорений звена приведения
7.10. Конструирование маховика
8. Синтез эвольвентного зубчатого зацепления
8.1. Основные положения
8.2. Геометрические параметры зубчатых колес
8.3 Эвольвентные профили зубьев
8.4. Геометрия положительного зацепления
8.5. Цели смещения
8.6. Вписывание в заданное межосевое расстояние
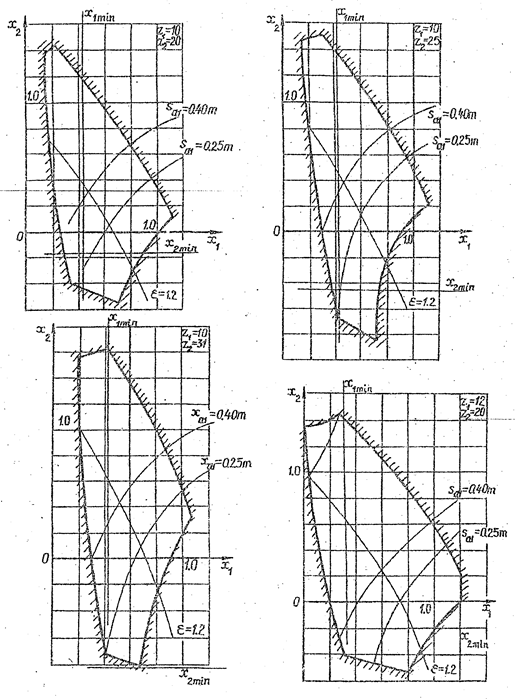
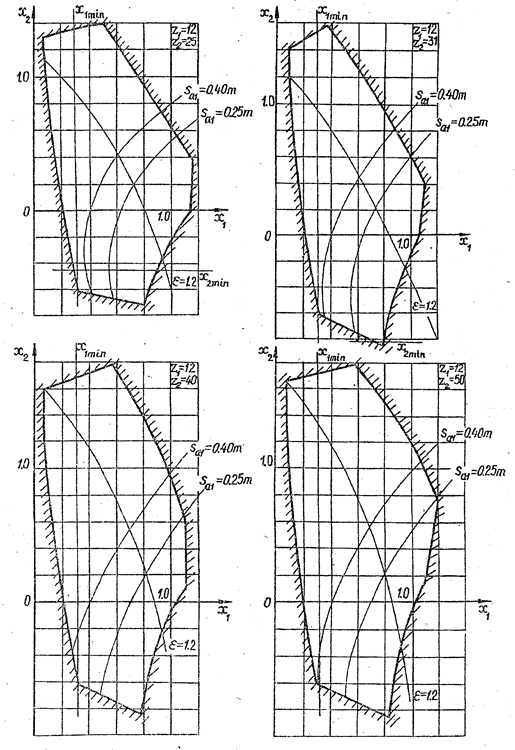
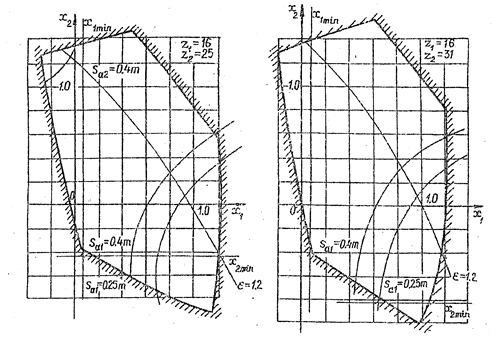
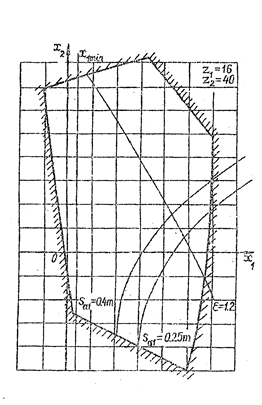
8.7. Блокирующий контур
8.8. Таблицы коэффициентов смещения
8.9. Диаграммы удельных скольжений
8.10. Диаграмма коэффициента давления
8.11. Компьютерные расчёты
8.12. Построение картины эвольвентного цилиндрического зацепления
8.13. Контрольные параметры
9. Синтез планетарной передачи
9.1.Основы проектирования
9.2. Условия синтеза
9.3. Компьютерные расчёты
10. Содержание третьего листа курсового проекта
11. Кулачковые механизмы
11.1. Краткие теоретические сведения
11.2. Законы движения толкателя
11.3. Углы давления и передачи
11.4. Определение основных параметров
11.5. Профилирование кулачка
ПРИЛОЖЕНИЯ
ЛИТЕРАТУРА
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.