Тестовые задания по ТММ
сборка по материалам Росаккредагентства
(att.nica.ru, i-exam.ru), НГПУ, КамГПИ и каф. «Механизация…»,
доц. Глухов Б.В.
|
Разделы (дидактические единицы) |
Количество вопросов |
||
|
Общее |
Схемы, рисун. |
Задачи |
|
|
1. Основные положения |
40 |
5 |
8 |
|
2. Структура |
58 |
21 |
12 |
|
3. Кинематика рычажных механизмов |
30 |
2 |
12 |
|
4. Динамика |
80 |
3 |
13 |
|
5. Кинематика передач |
83 |
22 |
24 |
|
6. Эвольвентное зацепление |
65 |
3 |
6 |
|
7. Кулачковые механизмы |
12 |
3 |
0 |
|
8. Виброзащита |
9 |
5 |
0 |
|
Итого |
377,368 |
56 |
75 |
1.Основные положения
1. Совокупность средств человеческой деятельности, созданных для осу-ществления процессов производства и обслуживания непроизводственных потребностей общества – это...
1) устройство 2) механизм
3) техника 4) узел
2. Машина – это устройство, предназначенное для…
1) выполнения полезной работы 2) преобразования движений
3) передачи движений 4) передачи и преобразования движения
3. Устройство, выполняющее механические движения для преобразования энергии, материалов и информации, это...
1) кинематическая пара 2) механизм
3) машина 4) узел
4. Машины по выполняемым ими функциям разделяют на классы…
1) энергетические, рабочие, информационные
2) энергетические, рабочие, информационные, кибернетические
3) рабочие, аналитические, информационные, кибернетические
4) энергетические, рабочие, аналитические
5. Энергетическая машина - это...
1) машина, предназначенная для преобразования любого вида энергии в механическую энергию (и наоборот)
2) машина, предназначенная для преобразования материалов
3) машина, изменяющая форму, свойства и состояния материала или обрабатываемого объекта
4) машина, предназначенная для преобразования информации
6. Генератор электрического тока является машиной…
1) транспортной 2) технологической
3) энергетической 4) информационной
7. Рабочая машина - это…
1) машина – двигатель
2) машина, преобразующая информацию
3) машина, преобразующая материалы
4) кибернетическая машина
8. Транспортная машина - это…
1) машина – двигатель
2) рабочая машина, изменяющая форму, свойства и состояние материала или обрабатываемого объекта
3) технологическая машина, преобразующая форму объекта
4) машина, изменяющая положение перемещаемого объекта
9. Транспортирующие машины это…
1) машины-автоматы 2) электродвигатели
3) автоматические линии 4) рабочие машины
10. Механизмом называется…
1) устройство для преобразования энергии
2) устройство для передачи полезной работы
3) устройство для преобразования механического движения
4) система подвижных звеньев, связанных кинематическими парами
11. Механизм предназначен для…
1) выполнения полезной работы
2) передачи и преобразования механических движений
3) передачи информации
4) передачи и преобразования энергии
12. Устройством для передачи и преобразования вращательного движения между двумя валами является…
1) машина 2) механизм
3) приспособление 4) сборочная единица
13. Система тел, предназначенная для преобразования механического движения, называется…
1) механизмом 2) машиной
3) техникой 4) сборочной единицей
14. Механизм, все подвижные звенья которого описывают траектории в одной плоскости или в параллельных плоскостях, это... механизм.
1) пространственный 2) плоский
3) линейный 4) симметричный
15. Кинематической парой называется…
1) неподвижное соединение двух соприкасающихся звеньев
2) подвижное соединение более чем двух звеньев
3) подвижное соединение двух соприкасающихся звеньев
4) два звено, не связанные кинематическими парами
16. Соединение двух соприкасающихся звеньев механизма, допускающее их относительное движение, называется …
1) кинематическим соединением 2) структурной группой
3) кинематической парой 4) кинематической цепью
17. Кинематическая пара называется высшей, если…
1) звенья соприкасаются по поверхности
2) звенья соприкасаются по линии или в точке
3) звенья соприкасаются по плоскости
4) звенья соприкасаются по линии
18. Кинематическая пара называется низшей, если…
1) звенья соприкасаются по поверхности
2) звенья соприкасаются по линии или в точке
3) звенья соприкасаются по линии
4) звенья соприкасаются любым образом
19. Механизмы с высшими кинематическими парами превосходят механизмы с низшими кинематическими парами ...
1) большей точностью преобразования движения
2) передачей движения на большие расстояния
3) возможностью передачи больших сил
4) использованием меньшего количества звеньев в цепи
20. Примером одноподвижной кинематической пары является пара …
1) цилиндр на плоскости 2) шар на плоскости
3) винтовая 4) сферическая
21. Примером двухподвижной кинематической пары является пара …
1) цилиндр на плоскости 2) цилиндрическая
3) вращательная 4) сферическая
22. Примером трёхподвижной кинематической пары является пара …
1) шар на плоскости 2) цилиндрическая
3) вращательная 4) сферическая
23. Примером четырёхподвижной кинематической пары является пара …
1) шар на плоскости 2) цилиндр на плоскости
3) вращательная 4) сферическая
24. Число степеней свободы кинематической пары на рисунке равно…
1) 2 2) 1
3) 3 4) 5
25. Число степеней свободы кинематической пары на рисунке равно…
1) 1 2) 2
3) 3 4) 4
26. Число степеней свободы кинематической пары на рисунке равно…
1) 1 2) 2
3) 3 4) 4
27. Число степеней свободы кинематической пары на рисунке равно…
1) 1 2) 2
3) 3 4) 4
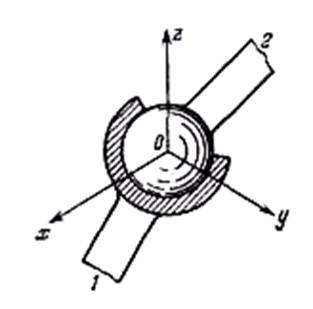
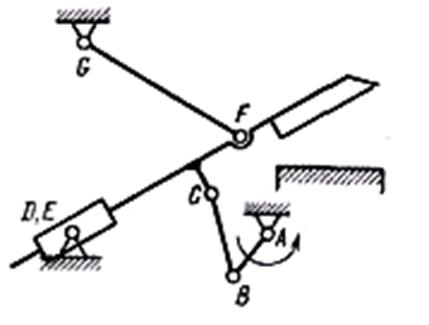
28. Число степеней свободы кинематической пары Е равно…
1) 1 2) 2
3) 3 4) 4
29. Число степеней свободы кинематической пары С равно…
1) 1 2) 2
3) 3 4) 4
30. Число степеней свободы кинематической пары Е равно…
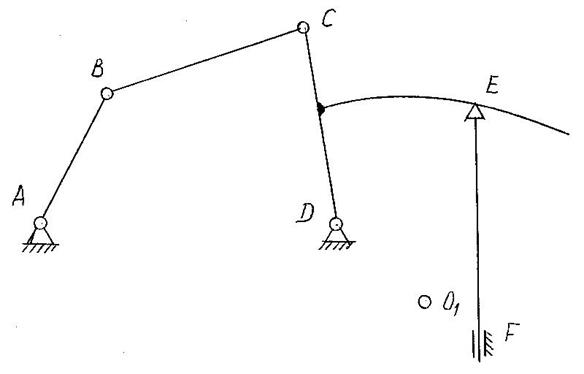
1) 1 2) 2
3) 3 4) 0
31. Число степеней свободы кинематической пары В равно…
1) 1 2) 2
3) 3 4) 0
32. Кинематическая пара, приведенная на рисунке, называется …
1) винтовой 2) поступательной
3) вращательной 4) сферической

33. На рисунке приведено условное обозначение по ГОСТ 2.770…
1) винтовой кинематической пары
2) поступательной кинематической пары
3) цилиндрической кинематической пары
4) вращательной кинематической пары
34. На рисунке приведено условное обозначение по ГОСТ 2.770…
1) винтовой кинематической пары
2) поступательной кинематической пары
3) цилиндрической кинематической пары
4) вращательной кинематической пары
35. На рисунке приведено условное обозначение по ГОСТ 2.770…
1) винтовой кинематической пары
2) вращательной двукратной кинематической пары
3) цилиндрической кинематической пары
4) вращательной кинематической пары
36. На рисунке приведено условное обозначение по ГОСТ 2.770…

1) винтовой кинематической пары
2) сферической кинематической пары
3) сферической с пальцем кинематической пары
4) вращательной кинематической пары
37. Кинематическая цепь – это…
1) система звеньев, образующих между собой кинематические пары
2) система звеньев, образующих между собой кинематические связи
3) система звеньев, образующих между собой кинематические соединения
4) система звеньев, образующих между собой высшие кинематические пары
38. Механизм отличается от кинематической цепи …
1) наличием неподвижного звена (стойки)
2) отсутствием неподвижного звена
3) наличием подвижных звеньев
4) наличием целесообразных движений
39. В плоской кинематической цепи…
1) все точки совершают движение в одной плоскости
2) все точки совершают движение в двух плоскостях
3) все точки совершают движение параллельно одной плоскости
4) все точки совершают движение параллельно двум плоскостям
40. В замкнутой кинематической цепи…
1) выходное звено не соединено со стойкой
2) все звенья подвижны
3) входное звено не соединено со стойкой
4) входное и выходное звенья соединены со стойкой
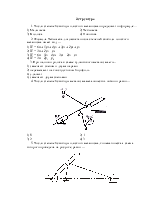
2.Структура
1. Число степеней свободы плоского механизма определяют по формуле ...
1) Малышева 2) Чебышева
3) Виллиса 4) Новикова
2.Формула Чебышева для расчёта числа степеней свободы плоского механизма имеет вид …
1) W = 6n + 5p5 + 4p4 + 3p3 + 2p2 + p1
2) W = 3n + 2p1 – p2
3) W = 6n – 5p1 – 4p2 – 3p3 – 2p4 – p5
4) W= 3n – 2p1 – p2
3. При наличии ролика в схеме кулачкового механизма его…
1) заменяют звеном и двумя парами
2) перемещают на конструктивный профиль
3) удаляют
4) заменяют двумя звеньями
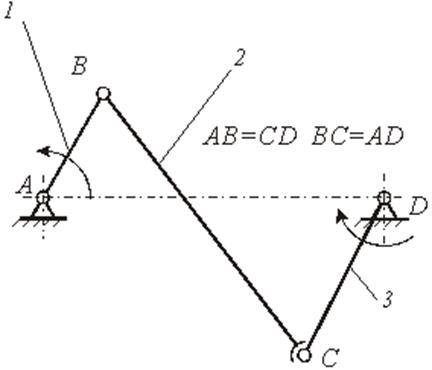
4. Число степеней свободы механизма механических ножниц равно…
1) 0 2) 1
3) 2 4) 3
5. Число степеней свободы плоского механизма, кинематическая схема которого приведена на рисунке, равно …
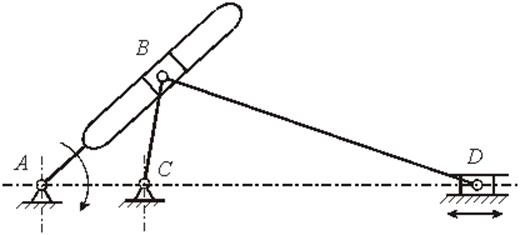
1) 1 2) 2
3) 3 4) 0
6. Число степеней свободы плоского механизма, кинематическая схема
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.