













4. ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Исходные данные на проектирование привода принимают по разд. 3. В пояснительной записке в разделе “Техническое задание” приводят числовые исходные данные с текстом по типу:
Спроектировать привод цепного конвейера по следующим исходным данным:
- окружное усилие на барабане Ft= 2,5 кН;
- скорость ленты u = 0,6 м/с;
- диаметр барабана Dб = 300 мм;
- срок службы L = 6 лет.
По кинематической схеме привода (см. разд. 5), которую следует расположить в пояснительной записке по тексту, необходимо сделать краткое описание устройства и работы привода, перечисляя элементы со ссылками на номера позиций в направлении потока мощности. Указывают режим работы исполнительного механизма, влияющий на расчёты элементов привода, например, работа спокойная либо с толчками и ударами. Кроме того, в техническом задании отражают дополнительные исходные данные, в частности:
1) место размещения привода (литейный либо механический цех, карьер и т.д.) и связанные с этим условия работы элементов привода;
2) тип исполнительного механизма (если не задан);
3) наличие или отсутствие реверсирования (в конвейерах передачи работают нереверсивно);
4) число смен работы (рекомендуется принимать двухсменную работу);
5) класс нагрузки зубчатых передач (принимать Н 0,8 или Н 0,63);
6) продолжительность включения (принимать ПВ = 0,15; 0,25; 0,4);
7) конструкция корпуса редуктора (задана литая или сварная), которая определяет:
8) масштаб выпуска изделий (серийное, единичное производство) и др.
5. КИНЕМАТИЧЕСКАЯ СХЕМА ПРИВОДА
Кинематическую схему выполняют по ГОСТ 2.703 с изображением элементов кинематики по ГОСТ 2.770. В заданиях №№ 21...24 студенту необходимо расположить передачи в приводе по заданному их перечню, руководствуясь следующими соображениями:
1. Ремённую передачу в комбинации с зубчатым редуктором всегда ставят первой ступенью как менее нагруженную.
2. Цепную передачу ставят последней, тихоходной ступенью, так как при высоких скоростях возникают большие центробежные силы в цепи.
Кинематические схемы в соответствии с ГОСТ 2.703 оформляют по следующим правилам:
1) Валы нумеруют римскими цифрами, которые располагают на полочках. Линию-выноску оканчивают на валу стрелкой. Номер вала можно проставлять как снаружи, так и внутри изображения агрегата, обрамлённого тонкой линией.
2) Каждый элемент нумеруют обычными цифрами, начиная с источника движения либо от ведущего вала. Линия-выноска указывает на элемент и заканчивается полочкой, вынесенной за пределы изображения. Под полочкой указывают характерные параметры (модули, числа зубьев, углы наклона в зубчатых колесах, диаметры шкивов, обозначение подшипников и др.).
3) Комбинацию элементов, объединенных общностью выполняемых функций (например, редуктор), обрамляют тонкой сплошной линией с пояснением ко всему агрегату типа «Редуктор цилиндрический двухступенчатый», «Редуктор коническо-цилиндрический» и т.п. с указанием основных параметров устройства (максимальные мощность, частота вращения, вращающий момент).
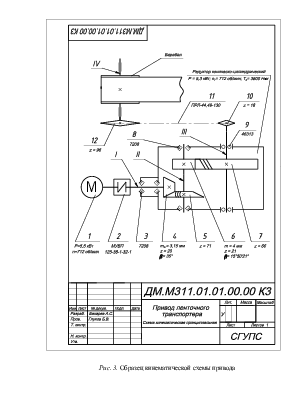
Окончательный вид кинематическая схема приобретает после расчёта всех элементов привода. Образцы кинематических схем приведены на рис. 3 и в СТО [13]. В обозначении документа последние два знака — К3 расшифровываются так: схема кинематическая (К) принципиальная (3).
Рис. 3. Образец кинематической схемы привода
6. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ И КИНЕМАТИЧЕСКИЙ РАСЧЁТ
Привод общего назначения состоит из электродвигателя и трансмиссии (передачи). В проектируемых приводах рекомендуется использовать трехфазные асинхронные короткозамкнутые двигатели единой серии АИР с синхронными частотами вращения nс = 750, 1000, 1500 и 3000 об/мин. Для выбора двигателя необходимо знать мощность Рвых и частоту вращения nвых на приводном валу (на рис. 3 вал рабочего органа имеет номер позиции IV, а его параметры обозначают PIV и nIV).
В некоторых заданиях потребная мощность на выходном валу привода задана, в других она не задана в явном виде, но на приводном валу заданы другие параметры, позволяющие её определить. В последнем случае мощность на приводном валу в кВт:
![]() , (1)
, (1)
где Ft— окружное усилие, кН; u — скорость, м/с.
Частота вращения приводного вала (об/мин), не заданная в явном виде, может быть определена по формулам
![]() либо (2)
либо (2)
![]() , (3)
, (3)
В формулах (2) и (3):
D – диаметр барабана, мм; z— число зубьев звёздочки тяговой цепи; рц — шаг тяговой цепи, мм; число 60 осуществляет перевод минут в секунды, 103 – миллиметры в метры.
Потребную мощность двигателя определяют с учетом потерь во всех звеньях кинематической цепи:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.