PC-DMIS измеряет каждую точку на основе заданного шага и последних измеренных точек. Подвод щупа осуществляется перпендикулярно линии, соединяющей две последние точки. Щуп останется на секущей плоскости. PC-DMIS начнет процесс от первой граничной точкиwill и продолжит, осуществляя касания с заданным шагом, а остановится, когда достигнет конечную граничную точку.
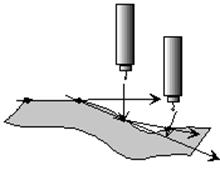
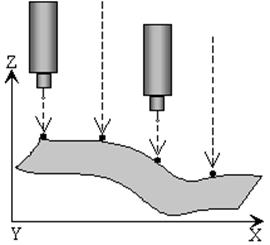
Сканирование идет с постоянным шагом. Щуп подводится по нормали к выбранным осям. Вектор подвода лежит в секущей плоскости и перпендикулярен заданной оси. Режим BODY AXIS использует то же направление подвода (в отличие от режима LINE, при котором направление подвода должно быть перпендикулярно линии, проведенной между последними измеренными точками).
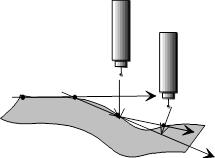
В этом режиме сканирование идет с переменным шагом в пределах от минимального до максимального. Направление подвода перпендикулярно прямой, соединяющей две последние измеренные точки.
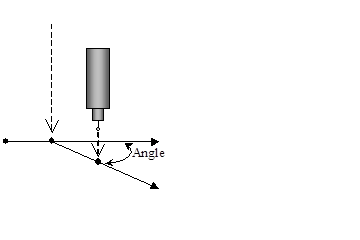
Для определения шага между точками нужно ввести возможные минимальное и максимальное значения. Также можно задать максимальное и минимальное значение для угла. PC-DMIS выполняет три первых измерения с минимальным шагом. Затем вычисляются углы между точками, образующим прямые 1-2 и 2-3.
· Если измеренный угол находится между минимальным и максимальным значениями, то PC-DMIS продолжит измерение с текущим шагом.
· Если угол больше максимального, то PC-DMIS отбрасывает последнюю измеренную точку и повторяет ее измерение с шагом, равным одной четверти от текущего.
· Если угол меньше заданного минимального, то PC-DMIS выполняет измерение с минимальным значением для шага.
PC-DMIS вновь вычисляет угол между последней измеренной точкой и двумя предыдущими точками. Процедура отбрасывания точек и уменьшение шага на четверть продолжается до тех пор, пока значение шага не станет равным минимальному или не попадет в допустимые пределы.
Если измеренный угол меньше минимального, то PC-DMIS увеличивает шаг вдвое. (Если это значение больше максимума, то шаг принимает максимальное значение.) PC-DMIS снова вычислит угол по последним точкам. Увеличение шага продолжается, пока измеренный угол остается в заданном диапазоне или величина шага не превысит максимально возможную.
Если УГОЛ > MAX ANG, то INC = INC / 4 пока MIN INC Если УГОЛ < MIN ANG, то INC = INC · 2 пока MAX INC
Поле MaxIncrement на вкладкеFilter позволяет установить величину шага между точками сканирования. Например, если задано значение 0.5, то точки будут расположены с шагом 0.5.
Сканирование по методу LINE требует задания начальной точки, точки направления и конечной точки.
· StartPoint: Начальная точка сканирования.
· D: Точка, которая задает направление сканирования.
· EndPoint: Конечная точка сканирования.
Сканирование по методу LINE использует следующие векторы.
· CutVec: Вектор CutVector перпендикулярен вектору InitialVector и прямой, проходящей через начальную и конечную точки. Щуп находится в этой плоскости во время сканирования.
· InitialVec : Вектор Initial Vector - это вектор подвода к начальной точке во время сканирования.
· EndVec: Вектор End Vector это вектор подвода к конечной точке во время сканирования.
· DirVec: Вектор Direction Vector указывает направление сканирования, он направлен от начальной к промежуточной точке.
Вектор сечения перпендикулярен вектору начального касания и прямой, проходящей через начальную и конечную точки.
Сканирование по методу LINE используют точки типа Vector или Surface. Смотри " Список Hit Type" на странице 20-24 для более подробной информации.
Сканирование по методу LINE выполняется с одним из следующих граничных условий:
· Plane (Плоскость)
· Sphere (Сфера)
· Cylinder (Цилиндр)
· Cone (Конус)
· Oldstyle (Условия старого типа)
Смотри "Использование кнопки Boundary" на странице 20-21 для более подробной информации.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.