Затем через измеренные точки (центры шарика) строится методом наименьших квадратов плоскость. Направление материала (направление компенсации радиуса шарика) учитывается положением точки CLP (т.е. она абсолютно необходима). Точка приложения вычисленной плоскости находится в геометрическом центре всех измеренных точек и смещена перпендикулярно к вычисленной плоскости на величину радиуса шарика (это и является радиус-коррекцией). Вычисленная нормаль к плоскости направлена в сторону “от материала”. (Позже будем использовать направление плоскости для нашей оси Z, а координату Z для нуля координатной системы).
Измерение прямой AXI(1)
Прямые измеряются командой MEAXI. Задаем:
· Имя элемента – AXI(1)
· Имя координатной системы – CSY
А также:
· Delete points (Стирать точки) – Да
· Режим “Mode” – Мерить “Да”, Вычислять “Да”, Оценивать “Нет”
MEAXI (NAM=AXI(1), CSY=REFR$CSY, MOD=NOE, DEL=Y)
Порядок взятия точек – 1 CLP и несколько (минимум 2) PRB.
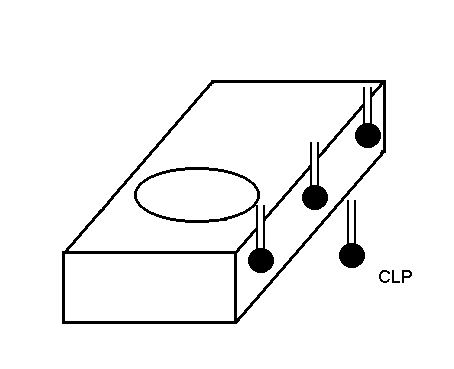
По измеренным точкам вычисляется прямая (по методу наименьших квадратов). Направление прямой – от первой измеренной точки PRB ко второй точке PRB. Радиус-коррекция проводится в направлении материала (от точки CLP к точке PRB), поэтому и здесь точка CLP абсолютно наеобходима).
Вычисленную прямую AXI(1) будем использовать позже, для построения направления оси “X” нашей координатной системы.
Измерение отверстия CIR(1)
Отверстия измеряются коммандой MECIR.
Задаем:
· Имя элемента – CIR(1)
· Имя координатной системы – CSY
А также:
· Delete points (Стирать точки) – Да
· Режим “Mode” – Мерить “Да”, Вычислять “Да”, Оценивать “Нет”
· Параметр “Inner / Outer” (“Внутренняя/внешняя” окружность) – устанавливаем значение “внутренная” (в случае измерения отверстия)
MECIR (NAM=CIR(1), CSY=REFR$CSY, INO=I, MOD=NOE, DEL=Y)
Порядок взятия точек – 1 CLP и несколько (минимум 3) PRB.
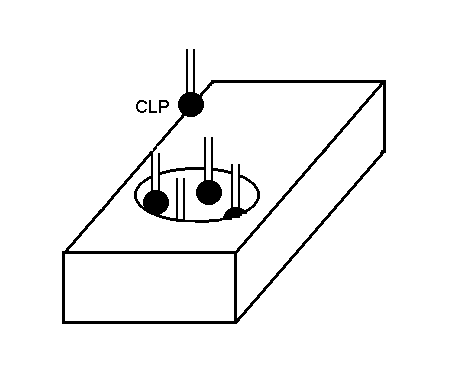
Порядок вычисления окружности – из всех PRB строится вспомогательная плоскость. Определяется, какая из координатных плоскостей активной координатной системы (в нашем случае это REFR$CSY - система координат машины) наиболее паралельна к этой построенной плоскости. Строится вспомогательная плоскость паралельная выбранной координатной плоскости и проходящая через центр тяжести всех измеренных точек PRB. Все точки проецируются на эту плоскость и из этих точек вычисляется (методом наименьших квадратов) окружность. Радиус-коррекция осуществляется в зависимости от значения параметра “внутренняя/внешняя”. (Видно что в этом случае точка CLP не играет особой роли – тем не менее, все таки лучше всегда ставить ее – таким образом создается полезный навык, помогающий избежать недоразумения при других типах элементов). В результате получаем все данные отверстия. Центр отверстия представлен как точка, координаты X и Y которой мы будем использовать для построения нашей координатной системы.
Построение координатной системы CSY(1)
Для построения координатных систем будем пользоватся всегда командой BLDCSY. Она требует следующих данных:
Ø Имя координатной системы
Ø Элемент для ориентировки 1-й (главной) оси
Ø Имя и направление этой оси
Ø Элемент для ориентировки 2-й оси
Ø Имя и направление этой оси
Ø Ноль по X – имя элемента, координата X которого будет использована для построения начала координат по Х
Ø Ноль по Y – имя элемента, координата Y которого будет использована для построения начала координат по Y
Ø Ноль по Z – имя элемента, координата Z которого будет использована для построения начала координат по Z
BLDCSY (NAM=CSY(1), SPA=PLA(1), SDR=+Z, PLA=AXI(1), PDR=+X, XZE=CIR(1), YZE=CIR(1), ZZE=PLA(1))
Выполнение этой команды автоматически активирует координатную систему CSY(1).
После построения системы координат всегда необходимо проверить правильность ее построения:
В верхнем меню из раздела “CMM” выбираем “Position” и, перемещая машину джойстиком, убеждаемся в том, что координатная система построена правильно (начало координат находится в заданной точке, направление осей координат соответствует заданному). Этот контроль очень важен всегда, когда строится координатная система и помогает избежать ошибок, грозящих серьезными столкновениями.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.