Следовательно, потенциальная точность измерения частоты сигнала тем выше, чем больше отношение сигнал-шум и эффективная длительность сигнала.
Структура оптимального измерителя частоты сигнала (радиальной скорости цели) коренным образом отличается от структуры оптимального измерителя временного положения сигнала (дальности). Дело в том, что оптимальный фильтр, входящий в состав последнего, обладает свойством инвариантности относительно временного положения сигнала и поэтому одинаково хорошо работает на любых дальностях. Действительно, запаздывание во времени сигнала на входе указанного фильтра, пропорциональное дальности отразившего его объекта, не влияет на форму выходного сигнала, а только вызывает его запаздывание на то же время.
Относительно же частоты сигнала оптимальный фильтр не обладает инвариантностью. Поэтому оптимальный измеритель частоты сигнала должен быть многоканальным.
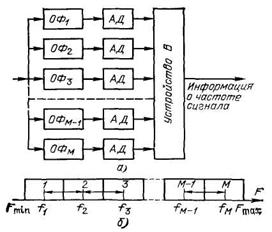
Каждый канал содержит оптимальный фильтр ОФ и
амплитудный детектор АД, и вырабатывает напряжение, которое поступает на
устройство определения канала В, на выходе которого напряжение максимально
(рис. 3,а). Каждый (k-й) фильтр ОФ настроен на свою частоту fk (рис. 3,б),
причем расстройка оптимальных фильтров соседних каналов равна разрешающей
способности применяемого сигнала по частоте. Если амплитуда сигнала постоянна
на всем интервале его действия ![]() то указанная расстройка Δf=1.2/
то указанная расстройка Δf=1.2/![]() . Поэтому если ожидаемый
диапазон смещений частоты сигнала простирается от Fmin до -Fmax, то необходимое
число каналов оптимального измерителя частоты
. Поэтому если ожидаемый
диапазон смещений частоты сигнала простирается от Fmin до -Fmax, то необходимое
число каналов оптимального измерителя частоты
М = (Fmax-Fmin)/Δf = 0,833
(Fmax-Fmln) ![]()
и, в частности, при Fmin =
—Fmax M=1,667Fmax![]() .
.
Если смещение частоты
обусловлено движением цели с радиальной скоростью ![]() , то Fmax = 2
, то Fmax = 2![]() и М = 3,33
и М = 3,33 ![]() ,
,
Где λ— длина волны.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.