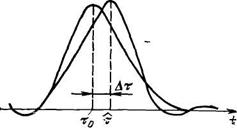
Временное положение сигнала и, в частности, момент его максимума характеризуют дальность отразившей его цели. Шум искажает сигнал на выходе фильтра (рис.1) и смещает момент его максимума до величины τ, которая и является оценкой временного положения. Разность этой оценки и момента максимума сигнала и составляет погрешность этого измерения:
Δτ=τ—τ![]() .
.
 Как правило, измерение параметров сигнала ведется при
достаточно большом отношении сигнал-шум, что и обеспечивает высокую точность
этого измерения. При этом предположении погрешность измерения
достаточно мала. Определим ее величину применительно к измерению временного
положения.
Как правило, измерение параметров сигнала ведется при
достаточно большом отношении сигнал-шум, что и обеспечивает высокую точность
этого измерения. При этом предположении погрешность измерения
достаточно мала. Определим ее величину применительно к измерению временного
положения.
Посредством математических преобразований вышеупомянутых уравнений получаем дисперсию случайной ошибки
σ![]() = M(Δτ
= M(Δτ![]() ) = M{[n
) = M{[n![]() (τ)]
(τ)]![]() }/[υ
}/[υ![]() (τ
(τ![]() )]
)]![]()
В ходе дальнейших преобразований получаем выражение для потенциальной точности измерения временного положения сигнала
σ![]() =
= ![]() =
=![]() ,
,
где g![]() =2E
=2E![]() /N
/N![]() - максимально возможное отношение
сигнал-шум на выходе линейного фильтра, т.е на выходе оптимального фильтра;
- максимально возможное отношение
сигнал-шум на выходе линейного фильтра, т.е на выходе оптимального фильтра;
П![]() =E
=E![]() /E
/E![]() - отношение энергий производной сигнала и
самого сигнала.
- отношение энергий производной сигнала и
самого сигнала.
E![]() =
=![]() ,
,
Где S![]() (
(![]() ) – амплитудный спектр сигнала υ
) – амплитудный спектр сигнала υ![]() (t), а
(t), а
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.