





выявить число, класс, вид и порядок структурных групп звеньев, а также число и подвижность первичных (элементарных) механизмов;
10) записать формулу состава структуры механизма;
11) произвести проверку полученных результатов;
12)определить класс механизма;
Задание 3. для плоского рычажного механизма.
1) выбрать масштабный коэффициент длины;
2) перевести все заданные геометрические параметры механизма, имеющие размерность длин (м) в масштабный коэффициент;
3) построить кинематическую схему механизма для заданного положения кривошипа.
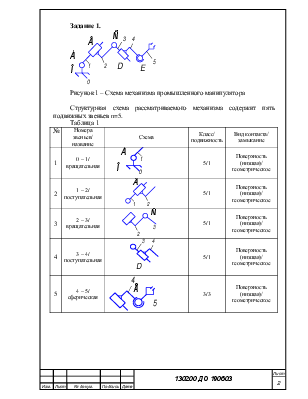
Задание 1.
Рисунок 1 – Схема механизма промышленного манипулятора
Структурная схема рассматриваемого механизма содержит пять подвижных звеньев n=5.
Таблица 1
|
№ |
Номера звеньев/ название |
Схема |
Класс/ подвижность |
Вид контакта/ замыкание |
|
1 |
0 – 1/ вращательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
2 |
1 – 2/ поступательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
3 |
2 – 3/ вращательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
4 |
3 – 4/ поступательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
5 |
4 – 5/ сферическая |
|
3/3 |
Поверхность (низшая)/ геометрическое |
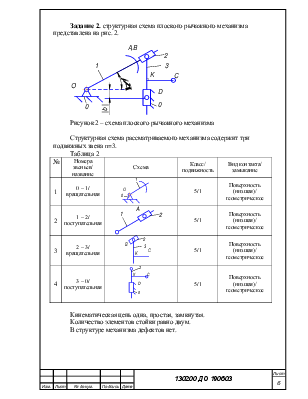
Кинематическая цепь одна, простая, не замкнутая.
Количество элементов стойки равно единице.
Подвижность пространственного механизма определяется с помощью структурной формулы Сомова-Малышева:
![]()
W=6n-5p5-4p4-3p3-2p2-p1, (1)
где n – число подвижных звеньев механизма;
p5, p4, p3, p2, p1 – число кинематических пар соответственно пятого, четвертого, третьего, второго, первого классов.
Из таблицы №1 следует, что n=5, p5=4, p4=0, p3=1, p2=0, p1=0. Подставляем численные данные в формулу (1)

Считая схват – 5 (выходное звено) неподвижным имеем
![]() ,
,
Число кинематических пар остается прежнее p5=4, p4=0, p3=1, p2=0, p1=0, тогда маневренность механизма будет определяться по следующей формуле
![]() (2)
(2)
![]()
Проверка осуществляется по следующей формуле:
Задание 2. структурная схема плоского рычажного механизма представлена на рис. 2.
Рисунок 2 – схема плоского рычажного механизма
Структурная схема рассматриваемого механизма содержит три подвижных звена n=3.
Таблица 2
|
№ |
Номера звеньев/ название |
Схема |
Класс/ подвижность |
Вид контакта/ замыкание |
|
1 |
0 – 1/ вращательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
2 |
1 – 2/ поступательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
3 |
2 – 3/ вращательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
4 |
3 – 0/ поступательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
Кинематическая цепь одна, простая, замкнутая.
Количество элементов стойки равно двум.
В структуре механизма дефектов нет.
Подвижность плоского механизма определяется с помощью структурной формулы Чебышева:
![]() (3)
(3)
где n – число подвижных звеньев механизма;
p5, p4, – число кинематических пар соответственно пятого, четвертого, классов.
Из таблицы №2 следует, что n=3, p5=4, p4=0. Подставляем выявленные значения коэффициентов в формулу (3)
![]() ,
,
Для выявления числа структурных групп и подвижности первичных механизмов используем структурную классификацию механизмов профессора Ассура.
Первая группа звеньев 2 – 3 рис. 3.
Рисунок 3 – первой структурной группы Ассура
Данная группа состоит из двух подвижных звеньев:
камень 2 и кулиса 3;
двух поводков:
кулиса 1 и стойка 0;
и трех кинематических пар:
1 – 2 поступательная пара пятого класса;
2 – 3 вращательная пара пятого класса;
3 – 0 поступательная пара пятого класса;
Тогда число подвижных звеньев ![]() , число
пар пятого класса
, число
пар пятого класса![]() , число пар четвертого класса
, число пар четвертого класса ![]() Условием существования структурной группы
с низшими кинематическими парами:
Условием существования структурной группы
с низшими кинематическими парами:
![]() (4)
(4)
Подставим выявленные значения коэффициентов в выражение (4) получим:
![]() .
.
Следовательно, группа звеньев 2 – 3 является структурной
группой Ассура 2 класса (т.к. ![]() ) 2 порядка (т.к. два
поводка) 2 вида (т. к ПВП).
) 2 порядка (т.к. два
поводка) 2 вида (т. к ПВП).
Вторая Группа звеньев 0 – 1 рис. 4.
Рисунок 4 – первичный механизм
Данная группа состоит из подвижного звена кулисы 1, стойки
0 и одной кинематической пары 0 – 1 – вращательная пятого класса, тогда ![]() .
.
Подставим выявленные значения коэффициентов в выражение (4) получим:
![]() .
.
Следовательно, группа звеньев 0 – 1 не является структурной группой Ассура, а представляет собой первичный механизм, подвижность которого равна 1.
Формула состава структуры механизма:
Класс механизма определяется классом наиболее сложной структурной группы. Рассмотренный механизм является механизмом второго класса.
Задание 3.
Для того чтобы построить кинематическую схему механизма
необходимо выбрать масштабный коэффициент длин ![]() .
Рассчитывается по следующей формуле:
.
Рассчитывается по следующей формуле:
 , (5)
, (5)
где ![]() - масштабный коэффициент
- масштабный коэффициент  ;
;
![]() - действительная длина кривошипа,
измеряемая в метрах;
- действительная длина кривошипа,
измеряемая в метрах;
![]() - отрезок, взятый в миллиметрах
изображающий действительную длину кривошипа
- отрезок, взятый в миллиметрах
изображающий действительную длину кривошипа ![]() в
принятом масштабный коэффициент длин.
в
принятом масштабный коэффициент длин.
![]()
 .
.
Переводим все заданные геометрические параметры механизма (длины звеньев) имеющие размерность длин (м) в масштаб коэффициент.
Для этого действительные длины звеньев в метрах делим на полученный масштабный коэффициент длин и получаем длину звена, которая будет на чертеже в миллиметрах.
.
 , (6)
, (6)
Получаем следующие значения:
Теперь, когда все размеры звеньев механизма переведены в масштабный коэффициент можно приступать к построению кинематической схемы.
На плоскости формата произвольно ставим точку О. В направлении против часовой стрелки
угол
![]() и
в заданном направлении от точки О отмеряем отрезок ОА длиной равный длине
кулисы 1.
и
в заданном направлении от точки О отмеряем отрезок ОА длиной равный длине
кулисы 1.
В точке А кулиса соединена с камнем, вычерчиваем 2 элемент
структуры. Через камень проводим вертикальную прямую. От точки О откладываем
отрезок длиной равный значению параметра ![]() . На
конце отрезка, обозначим точкой D, будут располагаться
один из элементов стойки 0.
. На
конце отрезка, обозначим точкой D, будут располагаться
один из элементов стойки 0.
От точки В вниз по вертикали откладываем отрезок длиной равный
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.