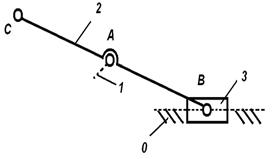
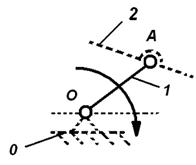
рассматриваемого механизма состоит из четырех звеньев:
1 звено ОА - кривошип,
2 звено СВ - шатун,
3 звено В - ползун,
0 - стойка.
Звено – это твердое тело или система жестко связанных тел, входящих в состав механизма.
![]() Стойка– неподвижное звено. Стойка изображается . Звено,
к которому изначально сообщается движение, называется входным (начальным, ведущим). Звено, совершающее
движение, для выполнения которого предназначен механизм – выходное звено.
Стойка– неподвижное звено. Стойка изображается . Звено,
к которому изначально сообщается движение, называется входным (начальным, ведущим). Звено, совершающее
движение, для выполнения которого предназначен механизм – выходное звено.
Начинается нумерация с ведущего звена. Если ведущее звено совершает вращательное движение, то оно называется кривошипом.
Подвижность механизма – это число независимых обобщенных координат, однозначно определяющие положение звеньев, в рассматриваемый момент времени на плоскости или пространстве.
Число степеней свободы исследуемого механизма определяется по формуле Чебышева:
![]()
где n - число подвижных звеньев в составе исследуемой кинематической цепи;
![]() и
и ![]() —
соответственно число пар четвертого и пятого класса.
—
соответственно число пар четвертого и пятого класса.
Кинематическая пара (КП) – это подвижное соединение двух звеньев допускающее их определенное относительное движение.
Кинематическая цепь – это система подвижных звеньев механизма образующая между собой кинематические пары.
Для
определения величины коэффициента ![]() проанализируем
структурную схему механизма (рис.1). Структурная схема механизма состоит из
четырех звеньев:
проанализируем
структурную схему механизма (рис.1). Структурная схема механизма состоит из
четырех звеньев:
0 - стойка,
1 - кривошип,
2 - шатун,
3 – ползун.
При этом
звенья 1-3 являются подвижными звеньями, а стойка 0 - неподвижным звеном. Она
представлена в составе структурной схемы одной шарнирно-неподвижной опорой и
направляющей ползуна 3. Следовательно, ![]() .
.
Для определения значений ![]() и
и ![]() найдем
все кинематические пары, вводящие в состав рассматриваемой кинематической цепи.
Результаты исследования заносим в таблицу 1.
найдем
все кинематические пары, вводящие в состав рассматриваемой кинематической цепи.
Результаты исследования заносим в таблицу 1.
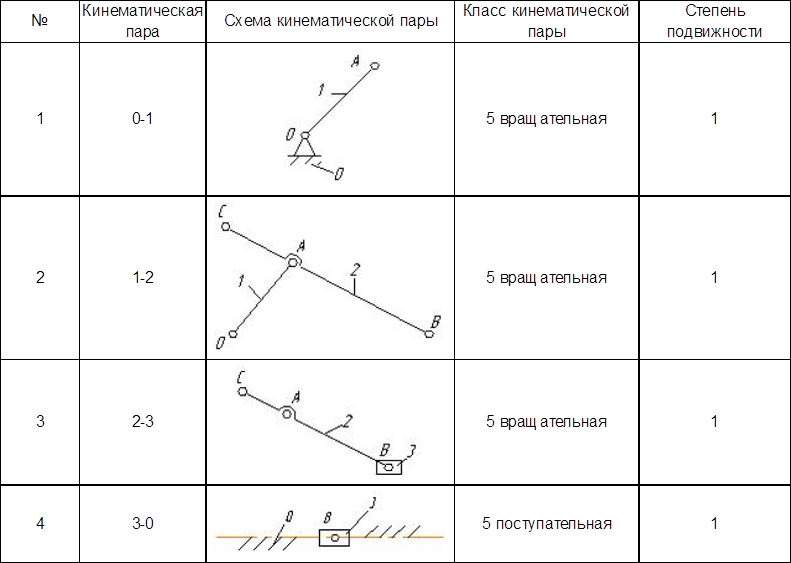
Из анализа данных табл.1. следует, что
исследуемая схема кривошипно-ползунного механизма состоит представляет собой
замкнутую кинематическую цепь и состоит из четырёх пар пятого класса.
Следовательно, ![]() , а
, а ![]() .
.
Подставив
найденные значения ![]() ,
, ![]() и
и ![]() в формулу Чебышева, получим:
в формулу Чебышева, получим:
![]()
Структурный состав кривошипно-ползунного механизма выполняется согласно принципу построения механизмов по Ассуру.
Начиная с выходного звена – ползуна 3, разбиваем рассматриваемую схему кривошипно-ползунного механизма на группы звеньев. При этом руководствуемся следующим правилом: если выделенная группа звеньев обладает совместно нулевой подвижностью, то эта группа звеньев является структурой группой Ассура.
Структурная группа Ассура (СГА) – это кинематическая цепь образованная только подвижными звеньями, совместная подвижность которой равна нулю.
Количество подвижных звеньев определяет класс СГА.
Рассмотрим группу звеньев 2-3.(Рисунок 2)
Данная группа состоит из двух подвижных звеньев: шатун 2 и ползун 3, и трех кинематических пар:
1-2 вращательная пара пятого класса;
2-3 вращательная пара пятого класса;
3-0 поступательная пара пятого
класса; тогда ![]() ;
;
![]() ,а
,а ![]() .
.
Подставив выявленные значения в формулу Чебышева, получим:
![]()
Следовательно, группа звеньев 3-2 является структурной группой Ассура 2 класса 2 порядка 2 вида.
Рассмотрим группу звеньев 0-1.(Рисунок 3)
Данная группа состоит из подвижного звена коромысло 1, стойки 0 и двух кинематических пар:
0-1 вращательная пара пятого класса;
1-2 вращательная пара пятого класса;
тогда
![]() ;
; ![]() , а
, а ![]() .
.
Подставив найденные значения формулу Чебышева, получим:
![]()
Следовательно, группа звеньев 0-1 не является структурной группой Ассура, а представляет собой первичный механизм, подвижность которого равна 1.
Первичный механизм (ПМ) – это механизм, состоящий из двух звеньев, одно из которых неподвижное и образующее между собой КП с подвижностью равной 1 или с подвижностью большей 1.
Из проведенного анализа следует, что число степеней свободы механизма равно 1; механизм имеет следующий структурный состав (Рисунок 4): первичный механизм с подвижностью равной 1 и одну структурную группу Ассура 2 класса 2 порядка 2 вида.
|
||||||
|
|
|||||
= +
Кинематический анализ – это один из видов исследования
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.