Методические указания к расчёту электромеханических переходных процессов.
1. Составление схемы замещения.
1.1. Определение эквивалентных параметров.
В задании к курсовой работе приведено количество генераторов каждой электростанции. Принимаем, что число трансформаторов в блоке равно числу генераторов. Эквивалентные мощность и сопротивление агрегата легко определяется по выражению:
= n• (1.1)
= , (1.2)
где: – мощность генератора или трансформатора; – сопротивление одного генератора или трансформатора; n – число блоков генератор – трансформатор на электростанции.
1.2. Приведение расчётной схемы к базисным условиям.
Известно, что для проведения расчётов в схемах с несколькими номинальными напряжениями требуется приведение всех элементов схемы к базисным условиям. Для этого задаемся двумя параметрами: базисной мощностью (выбирается произвольно) и базисным напряжением основной ступени .
Базисные напряжения остальных ступеней определяются по:
= , (1.3)
где - – коэффициенты трансформации в направлении от основной к i-й ступени напряжения.
Базисные токи определяются по формуле:
= (1.4)
Базисные сопротивления определяются по выражению:
= (1.5)
Сопротивления элементов схемы приводятся к базисным условиям по следующим выражениям:
Если сопротивления элементов заданы в относительных единицах:
= (ном)•• (1.6)
Если сопротивления элементов заданы в именованных единицах:
= (1.7)
1.3. Расчёт исходного режима.
Передаваемая активная мощность в относительных единицах может быть определена по формуле:
= (1.8)
Реактивная мощность определяется по:
= •tg(f) (1.9)
Полная мощность:
= + j• (1.10)
2. Расчёт статической устойчивости и предела передаваемой по линии мощности.
2.1. Расчёт предела передаваемой мощности и коэффициента запаса статической устойчивости.
В курсовой работе требуется определить предел передаваемой мощности для различных случаев: без учёта и при учёте явнополюсности генератора Г1, при учёте регулирующего эффекта нагрузки и при установке на генератор Г1 регуляторов пропорционального и сильного действия.
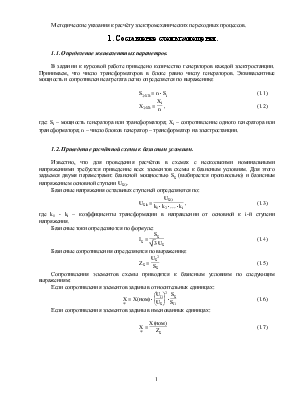
Для нахождения предельной мощности используем схему, в которой генератор Г1 работает на шины неизменного напряжения .
|
Рисунок 2.1 – Схема замещения для расчёта предела передаваемой мощности. |
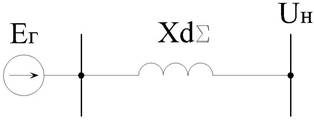
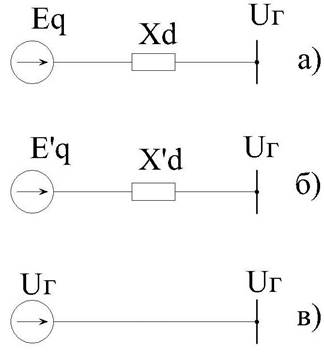
Синхронный генератор может представляться следующими математическими моделями:
1) Генератор, не имеющий регуляторов возбуждения.
В этом случае синхронный генератор представляется для исследования электромеханических переходных процессов ЭДС Eq и синхронным индуктивным сопротивлением Xd (рисунок 2.2-а).
2) Генератор, имеющий регулятор пропорционального действия.
Такая синхронная машина представляется на схеме замещения переходной ЭДС E'q и переходным сопротивлением X'd (рисунок 2.2-б).
3) Генератор, имеющий регулятор сильного действия.
В данном случае синхронный генератор представляется источником неизменного напряжения (рисунок 2.2-в).
Активная мощность отдаваемая генератором при неучёте явнополюсной конструкции ротора в зависимости от угла нагрузки определяется по формуле:
P(δ) = •sin(δ) (2.1)
|
а) регулятор возбуждения отсутствует; б) имеется регулятор пропорционального действия; в) имеется регулятор сильного действия. Рисунок 2.2 – Представление синхронной машины при исследовании электромеханических переходных процессов. |
ЭДС Eq генератора следует рассчитывать по выражению:
Eq = (2.2)
Предел передаваемой мощности находится как максимум зависимости P = f(δ). Из формулы (2.1) получаем:
= (2.3)
Коэффициент запаса статической устойчивости определяется как:
= •100% (2.4)
С учётом явнополюсности генератора Г1 отдаваемую активную мощность следует находить по формуле:
(δ) = + (2.5)
находится по следующему выражению:
= – , (2.6)
где: – фиктивная ЭДС генератора, её значение определяется по:
= (2.7)
E'q – переходная ЭДС генератора, определяется по выражению:
E'q = E'•cos(δ – δ') (2.8)
Значение ЭДС E' находится по формуле:
E' = (2.9)
Углы между векторами E' и (угол δ'), а также между векторами E'q (угол δ) находятся по выражениям:
δ' = (2.10)
δ = (2.11)
Далее в среде MathCAD определяется предел передаваемой мощности как точка максимума зависимости = f(δ) (2.5).
Расчёт предела передаваемой мощности при учёте регулирующего эффекта нагрузки.
В этом случае для определения предела передаваемой мощности нужно перейти от простейшей к более сложной схеме.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.