|
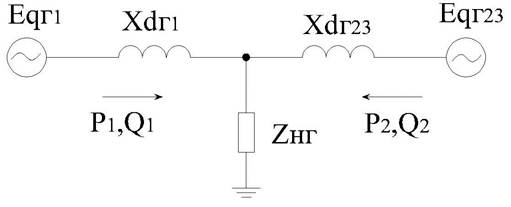
Рисунок 2.3 – Схема замещения для определения предела передаваемой мощности с учётом регулирующего эффекта нагрузки |
Генераторы Г2 и Г3 объединяются в эквивалентный генератор. Сопротивление Xdг23 (рисунок 2.3) определяется как параллельное соединение сопротивлений генератора Г2 и Г3. Эквивалентная мощность определяется как разность между мощностью нагрузки и передаваемой по линии мощности в исходном режиме.
= – (2.12)
ЭДС Eqг23 и угол определяются по формулам (2.2) и (2.10).
|
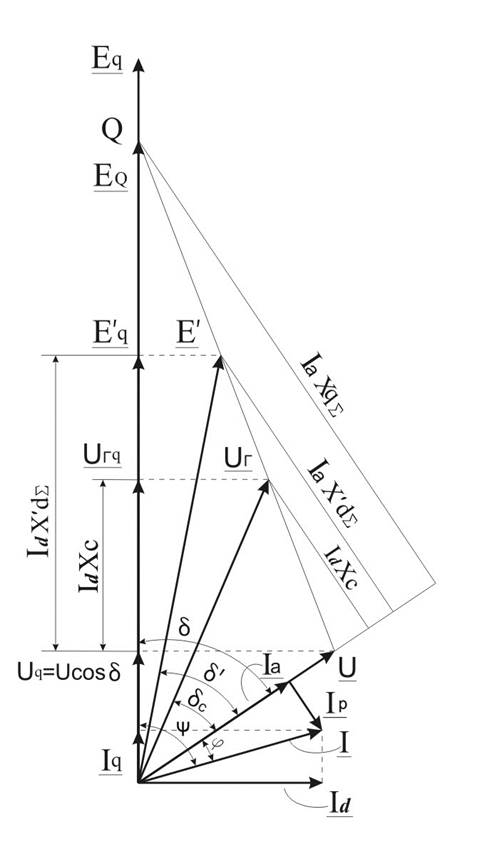
Рисунок 2.4 – Векторная диаграмма явнополюсной синхронной машины. |
Сопротивление нагрузки определяется по:
= (2.13)
Для схемы, приведённой на рисунке 2.3 активная мощность, отдаваемая генератором Г1 (передаваемая по линии мощность) в зависимости от взаимного угла генераторов Г1 и эквивалентного генератора Г23 определяется более общей формулой:
P() = Г12 + , (2.14)
где: , – собственные и взаимные проводимости узлов (наиболее просто они могут быть получены после преобразования схемы, представленной на рисунке 2.3 из соединения «звезда» в соединение «треугольник»); , – собственные углы нагрузки генераторов. Их следует определять из выражения:
, (2.15)
где = arg() – угол поворота числа на комплексной плоскости относительно действительной оси.
Далее в среде MathCAD определяется максимум функции (2.14) и определяется коэффициент запаса.
Расчёты запаса статической устойчивости при наличии регуляторов возбуждения далее следует проводить с учётом явнополюсной конструкции ротора синхронной машины и формулы (2.5) (при замене Eq и Xd на соответственно E'q и X'd).
Результаты расчётов статической устойчивости необходимо свести в таблицу.
Анализ зависимостей = f() и = f().
Предел передаваемой мощности в идеальном и наиболее простом случае, как было показано выше, определяется по выражению (2.3). Если туда записать зависимость ЭДС от угла , то мы получим выражение зависимости = f().
() = (2.16)
Зависимость коэффициента запаса от легко получается из (2.4):
() = (2.17)
Известно, что из-за наличия реакции якоря синхронного генератора угол можно изменять не произвольно, а в определённых пределах. Они зависят от конструкции синхронной машины (её номинальных параметров). Обычно для типовых синхронных машин номинальный cos находится в пределах 0,8÷0,9. Чаще всего значение данного параметра равно 0,85. Пределы регулирования угла можно найти по формуле:
= (2.18)
Далее требуется построить графики зависимостей (2.16) и (2.17) в найденных выше пределах.
2.2. Анализ статической устойчивости по критерию Гурвица.
Практические критерии статической устойчивости не дают возможности физически оценивать происходящие в электросистеме процессы. По ним можно лишь сказать, будет или не будет обеспечена статическая устойчивость. Увидеть какая именно неустойчивость (апериодическая или колебательная) возникает в системе при определённых параметрах можно лишь на основе исследования уравнений движения. Известно, что электрическая система при анализе электромеханических переходных процессов описывается системой нелинейных дифференциальных уравнений. Нелинейные коэффициенты этих уравнений линеаризуют в первом приближении в точке, соответствующей состоянию равновесия.
В данной курсовой работе анализ статической устойчивости по критерию Гурвица проводится для системы, с установленным на генераторе автоматическом регуляторе возбуждения пропорционального действия. Если пренебречь демпферным эффектом, то уравнение системы запишется в виде:
• + •( + )• + ( + • + •/)• +
+ ( + )•p + + ••/ = 0 (2.19)
Выражение (2.19) представляет собой упрощённое линеаризованное уравнение системы. Приведём пояснения к каждому члену данного выражения:
– постоянная времени регулятора возбуждения;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.