


1. Конструктивная схема
1.1 Конструктивная схема системы автоматического управления заданным параметром.
Проектирование САУ следует начинать с выбора принципиальной схемы регулятора. На практике, на тепловых электрических станциях, находят применение статические регуляторы или регуляторы с жесткими местными обратными отрицательными связями. Местные обратные отрицательные связи жесткие и гибкие могут быть либо кинематическими, либо силовыми.
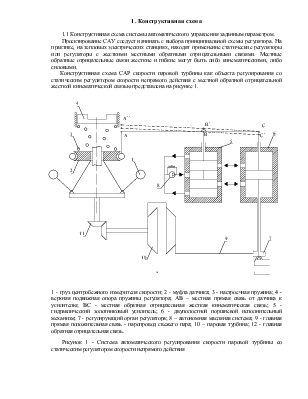
Конструктивная схема
САР скорости паровой турбины как объекта регулирования со статическим
регулятором скорости непрямого действия с местной обратной отрицательной
жесткой кинематической связью представлена на рисунке 1.
1 - груз центробежного измерителя скорости; 2 - муфта датчика; 3 - настроечная пружина; 4 - верхняя подвижная опора пружины регулятора; АВ – местная прямая связь от датчика к усилителю; ВС - местная обратная отрицательная жесткая кинематическая связь; 5 - гидравлический золотниковый усилитель; 6 - двуполостной поршневой исполнительный механизм; 7 - регулирующий орган регулятора; 8 – автономная масляная система; 9 - главная прямая положительная связь - паропровод свежего пара; 10 – паровая турбина; 12 - главная обратная отрицательная связь.
Рисунок 1 - Система автоматического регулирования скорости паровой турбины со статическим регулятором скорости непрямого действия
1.2 Описание работы САР.
В равновесном состоянии окна усилителя перекрыты и, как следствие, поршень исполнительного механизма и паровой клапан находятся в положении, обеспечивающие подачу пара к турбине, в соответствии с моментом сопротивления генератора при заданной скорости турбины. При выведении системы из равновесия, например, в следствии уменьшении нагрузки генератора, число оборотов турбины возрастает, грузы расходятся и муфта датчика идет вверх. И, следовательно, рычаг АВС занимает положение А`В`С. Таким образом, золотник усилителя идет вверх, открывая окна усилителя. Верхняя полость исполнительного механизма соединяется с напорной магистралью масляного насоса, а нижняя полость – со всасывающей. Под действием перепада давлений, поршень исполнительного механизма идет вниз, уменьшая посредством парового клапана расход пара на турбину. При этом точка С так же идет вниз. Новое равновесное положение системы и регулятора при данной конструктивной схеме может поступать только в том случае, когда окна усилителя будут вновь прикрыты. А это возможно только тогда, когда точка В` вернется в положение точки В. Обратим внимание на то, что не все равновесные положения при новой подачи пара поступают при условии, что точка А` не возвращается в положение точки А, а занимает некоторое новое положение точки А``.
1.3 Функциональная схема САР.
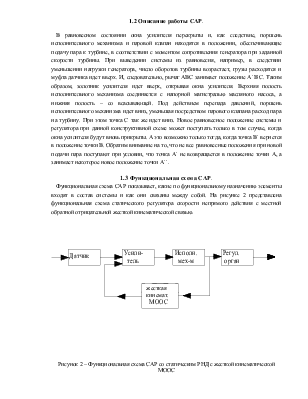
Функциональная схема САР показывает, какие по функциональному назначению элементы входят в состав системы и как они связаны между собой. На рисунке 2 представлена функциональная схема статического регулятора скорости непрямого действия с местной обратной отрицательной жесткой кинематической связью.
Рисунок 2 – Функциональная схема САР со статическим РНД с жесткой кинематической МООС
1.4 Структурная схема САР
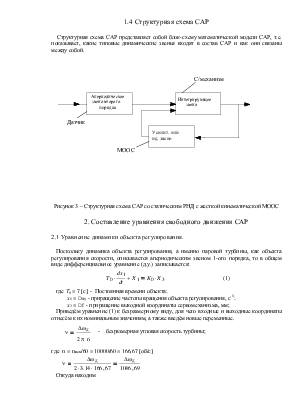
Структурная схема САР представляет собой блок-схему математической модели САР, т.е. показывает, какие типовые динамические звенья входят в состав САР и как они связаны между собой.
Рисунок 3 – Структурная схема САР со статическим РНД с жесткой кинематической МООС
2. Составление уравнения свободного движения САР
2.1 Уравнение динамики объекта регулирования.
Поскольку динамика объекта регулирования, а именно паровой турбины, как объекта регулирования скорости, описывается апериодическим звеном 1-ого порядка, то в общем виде дифференциальное уравнение (д.у.) записывается:
 где Т0 = 7 [с] -
Постоянная времени объекта;
где Т0 = 7 [с] -
Постоянная времени объекта;
х1 = Dwд - приращение частоты вращения объекта регулирования, с-1;
х3 = Df - приращение выходной координаты сервомеханизма, мм;
Приведём уравнение (1) к безразмерному виду, для чего входные и выходные координаты отнесём к их номинальным значениям, а также введём новые переменные.

- безразмерная угловая скорость турбины;
где n = nном/60 = 10000/60 = 166,67 [об/с]
Откуда находим
![]()
К0 = 1/δ0 - статический передаточный коэффициент усиления объекта регулирования;
δ0 = 0,3 - коэффициент самовыравнивания объекта регулирования;
К0 = 1/0,3 = 3,33
λ = Δφ/φном - безразмерная выходная координата сервомеханизма;
φном = 200 [мм] - номинальный ход главного парового клапана (для всех вариантов);
λ = Δφ/200
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.