Откуда находим
Δφ = 200 λ
Подставляя полученные выражения в уравнение (1), получим уравнение динамики объекта регулирования в безразмерных координатах.
Применяя к полученному уравнению преобразование Лапласа, получим:
![]()
Передаточная функция объекта регулирования:
2.2 Уравнение динамики датчика скорости регулятора.
В общем случае динамика центробежного датчика скорости описывается апериодическим звеном 2-ого порядка, д.у. которого записывается в виде:
 (2)
(2)
где Тд = 1,25 [с] - постоянная времени датчика;
Твт = 0,5 [с] - время вязкого трения датчика;
Кд = 0.8 - коэффициент усиления датчика;
Х2 = ΔS - приращение перемещения муфты датчика скорости;
Введём безразмерные координаты и новые переменные. Из пояснения к выводу уравнения динамики объекта регулирования берём:
х1 = Dwд = 1046,69ν
 - безразмерный ход муфты датчика
скорости;
- безразмерный ход муфты датчика
скорости;
где ![]() = 20 [мм] - номинальный ход муфты (для всех вариантов);
= 20 [мм] - номинальный ход муфты (для всех вариантов);
ΔS = 20μ
Подставляя полученные выражения в уравнение (2), получим уравнение динамики датчика скорости в безразмерных координатах.
Применяя к полученному уравнению преобразование Лапласа, получим:
![]()
Передаточная функция датчика скорости:
2.3 Уравнение динамики сервомеханизма.
Динамика сервомеханизма описывается типовым динамическим интегрирующим звеном, , д.у. которого записывается в виде:
 (3)
(3)
где Тсм = 2 [с] - постоянная времени сервомеханизма РНД;
Ксм = 5 - коэффициент усиления сервомеханизма РНД;
х2 = DS = 20m - приращение перемещения муфты датчика скорости;
х3 = ![]() - приращение выходной координаты сервомеханизма, мм;
- приращение выходной координаты сервомеханизма, мм;
Подставляя полученные выражения в уравнение (3), получим уравнение динамики сервомеханизма в безразмерных координатах.

Применяя к полученному уравнению преобразование Лапласа, получим:
![]()
Передаточная функция сервомеханизма:
2.4 Уравнение динамики жесткой МООС.
В общем случае динамика гибкой МООС описывается типовым динамическим дифференцирующим звеном.

где ξ = Δl - приращение выходной координаты МООС;
Введём относительные координаты выходного параметра МООС.
 - безразмерная выходная координата
МООС;
- безразмерная выходная координата
МООС;
![]() = 25 [мм] - номинальное значение выходной
координаты МООС (для всех вариантов);
= 25 [мм] - номинальное значение выходной
координаты МООС (для всех вариантов);
![]()
х3 = ![]()
Подставляя полученные выражения в уравнение (4), получим уравнение динамики жесткой МООС в безразмерных координатах.

Передаточная функция жесткой МООС:
4. Исследование динамики САР с использованием системы MatLAB
h1=tf(0.636,[7 1]) % передаточная функция объекта регулирования
h2=tf(4.187,[2.25 0.5 1]) % передаточная функция датчика
h3=tf(0.5,[2 0]) % передаточная функция сервомеханизма
h4=tf(0.4) % передаточная функция жесткой МООС
h5=feedback(h3,h4) % передаточная функция с/механизма, охваченного жесткой МООС
h6=series(h2,h5) % передаточная функция регулятора, охваченного жесткой МООС
h7=series(h6,h1) % передаточная функция разомкнутой САР
poles(h7)
ans =
-0.1111 + 0.6573i
-0.1111 - 0.6573i
-0.1429
-0.1000
k1=dcgain(h7) %коэффициент передачи разомкнутой системы
k1=6,65
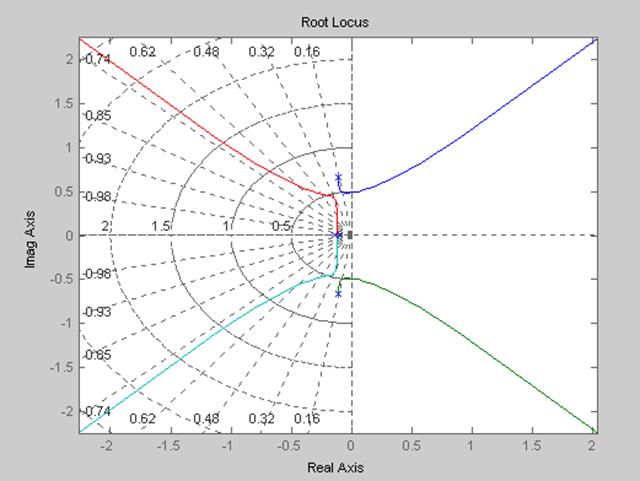
rlocus(h7), sgrid %построение корневого годографа
k2=rlocfind(h7) %интерактивный съем информации с гр. корн. годографа
h8=series(h7,k1/k2) %передаточная функция разомкнутой системы с Kopt
k3=dcgain(h6) %коэффициент передачи регулятора
k3=10,46
k4=dcgain(h1) %коэффициент передачи объекта
h9=series(h6,k2/k3*k4) %передаточная функция регулятора с Kopt
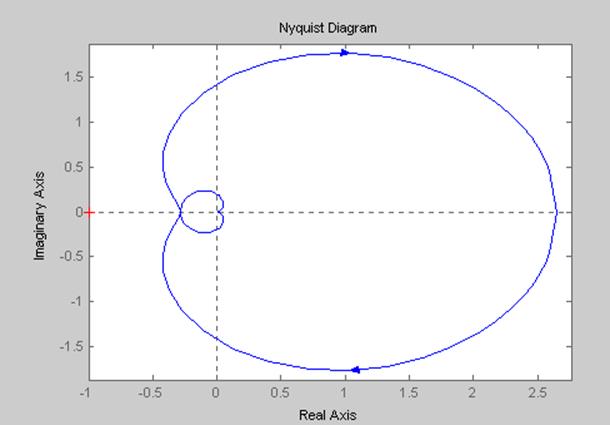
nyquist(h8),grid %годограф Найквиста
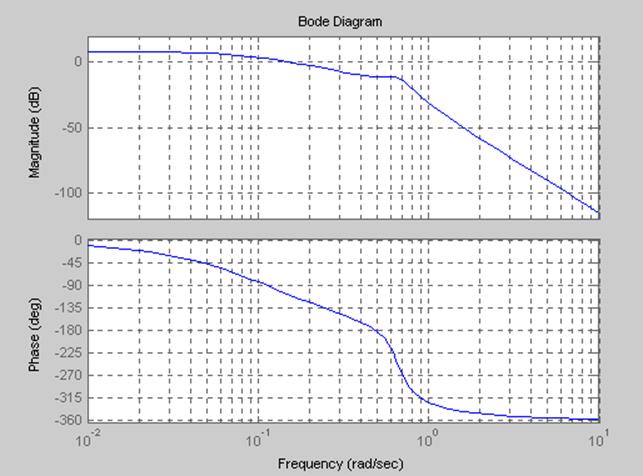
bode(h8),grid %диаграммы Боде
h10=feedback(h1,h9) %передаточная функция замкнутой системы
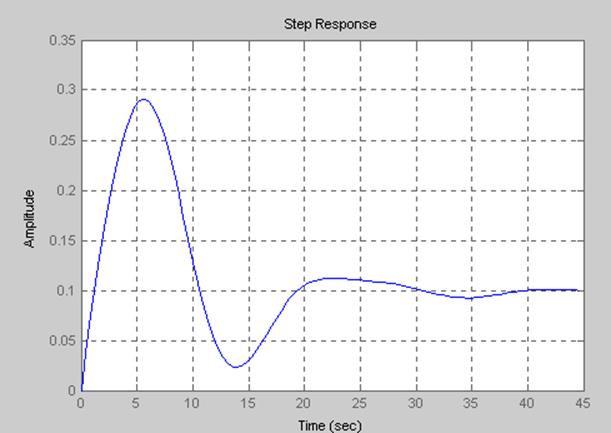
step(h10) %переходной процесс в замкнутой системе
Приложение А График корневого годографа
Приложение Б Годограф Найквиста
Приложение В Диаграммы Боде
Приложение Г График переходного процесса
Список использованных источников
1. Андриевский Б.Р. Избранные главы теории автоматического управления с примерами на языке MatLAB. / Б.Р. Андриевский, А.Л.Фрадков. – С.-П.: Наука, 1999.
2. Ерофеев А.А. Теория автоматизированного управления. – С.-П.: Политехника, 2001.
3. Ануфриев И.Н. MatLAB 5.3/6x. – СпБ: BHV, 2002. – 736 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.