Рис.4.3.3. Зависимость при N =50, Т = 50мс, G=10
Z = 8.5528
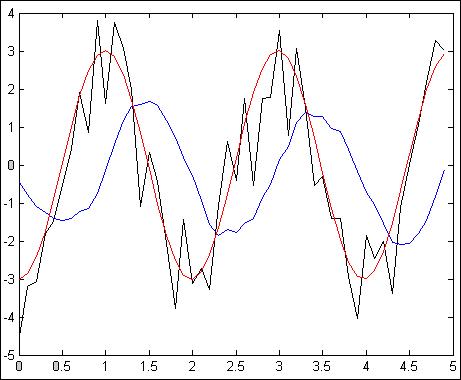
Рис.4.3.4. Зависимость при N =50, Т = 100мс, G=10
Z = 9.4153
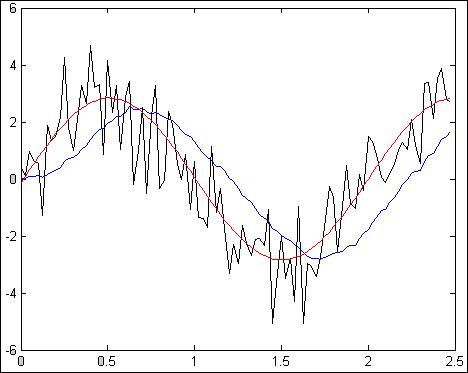
Рис.4.3.5. Зависимость при N =100, Т = 25мс, G=20
Z = 24.9475
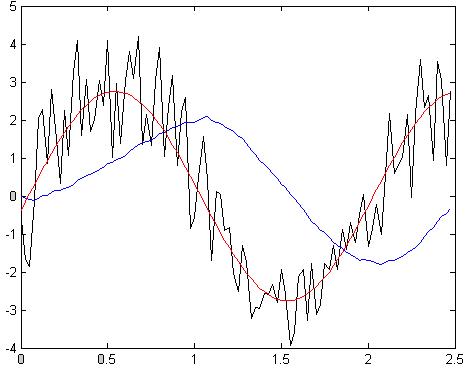
Рис.4.3.6. Зависимость при N =100, Т = 25мс, G=40
Z = 43.1592
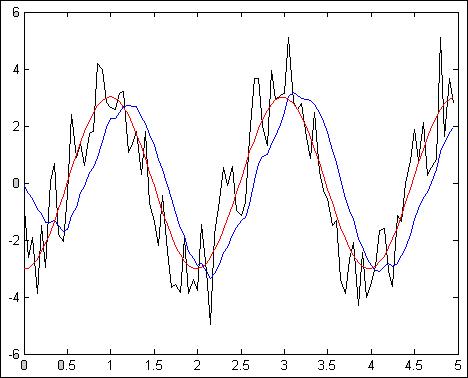
Рис.4.3.7. Зависимость при N =100, Т = 50мс, G=10
Z = 7.8589
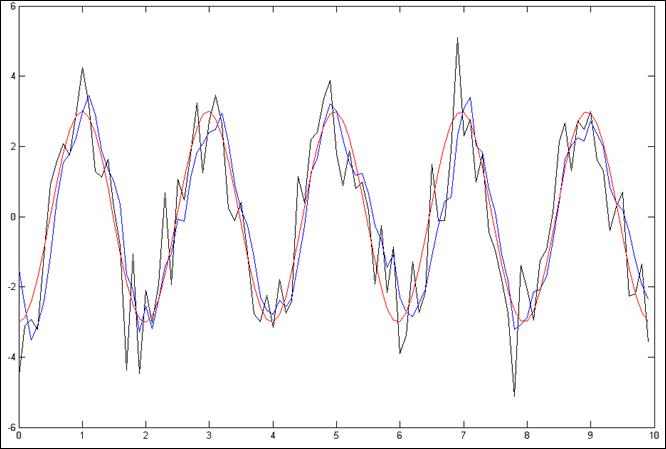
Рис.4.3.8. Зависимость при N =100, Т = 100мс, G=3
Z = 3.4591
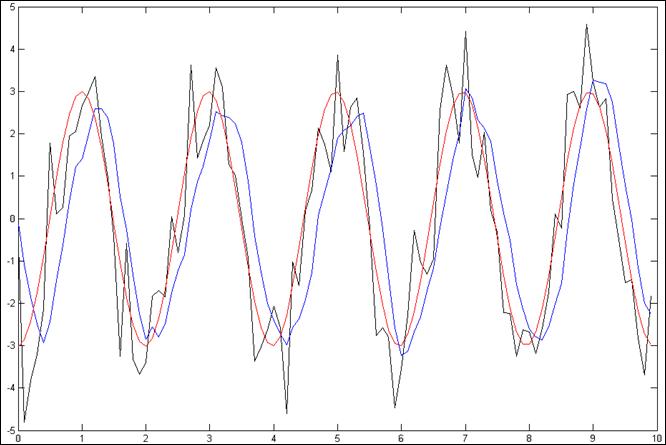
Рис.4.3.9. Зависимость при N =100, Т = 100мс, G=5
Z = 6.3504
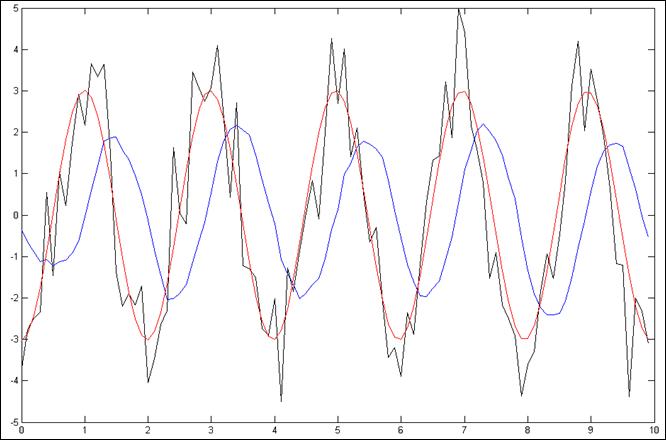
Рис.4.3.10. Зависимость при N =100, Т = 100мс, G=10
Z = 12.0848
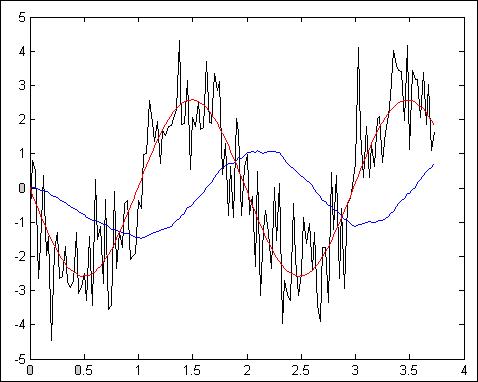
Рис.4.3.10. Зависимость при N =150, Т = 25мс, G=50
Z = 89.5259
Исследования постоянного сигнала с помехами:
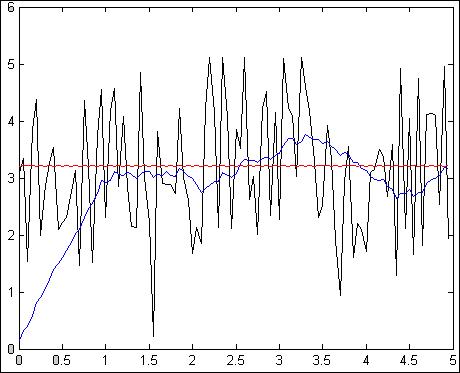
Рис.4.3.11. Зависимость при N =100, Т = 50мс, G=20
Z = 16.5449
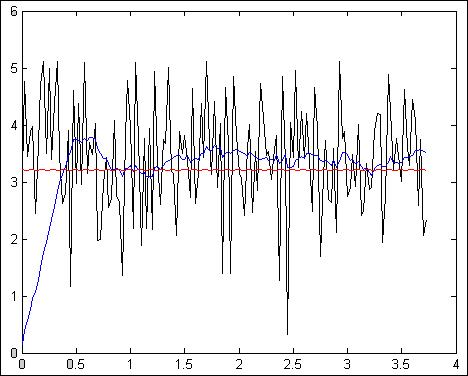
Рис.4.3.12. Зависимость при N =150, Т = 25мс, G=20
Z = 13.1635
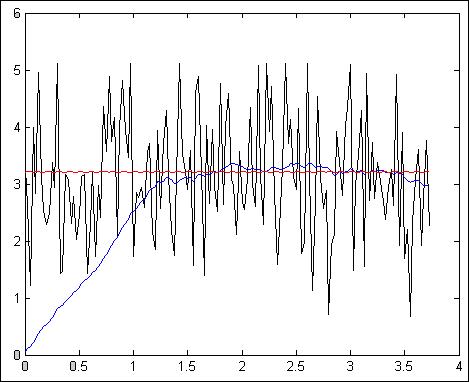
Рис.4.3.13. Зависимость при N =150, Т = 25мс, G=50
Z = 77.1104
Исходя из полученных зависимостей можно сделать следующие выводы:
- С уменьшением периода дискретизации амплитуда приближается к амплитуде полезного входного сигнала, сдвиг по фазе уменьшается.
- С увеличением глубины буфера качество отфильтрованного сигнала улучшается, но увеличивается фазовый сдвиг, при этом, если необходимо фильтровать синусоидальный сигнал, можно получить фазовый сдвиг 360, однако амплитуда при этом заметно упадет.
- При постоянном сигнале, увеличение глубины буфера заметно улучшает качество фильтрации.
4.4. Аналоговый фильтр первого порядка
Аналоговый фильтр первого порядка позволяет отфильтровывать помехи на синусоидальном(изменяющемся во времени) сигнале, при подаче на вход постоянного сигнала конденсатор заряжается до своего максимально возможного заряда, фильтр остается в режиме насыщения, поэтому ниже приведены графики только для синусоидального сигнала с помехой.
Ниже приведены снятые зависимости,
Черный цвет – зашумленный сигнал на входе фильтра
Синий цвет – отфильтрованный сигнал
Красный цвет – полезный сигнал на входе.
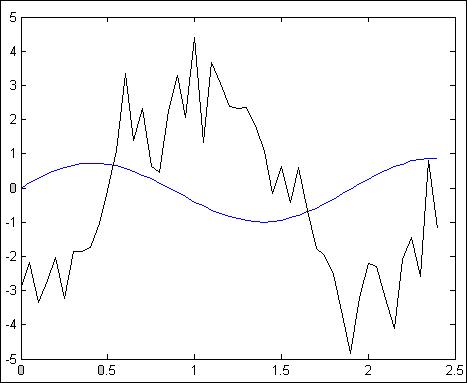
Рис.4.4.1. Зависимость при RC = 1
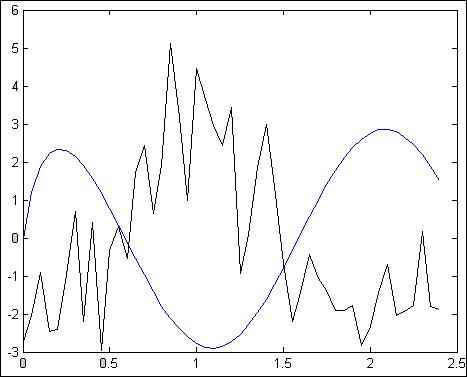
Рис.4.4.2. Зависимость при RC = 10
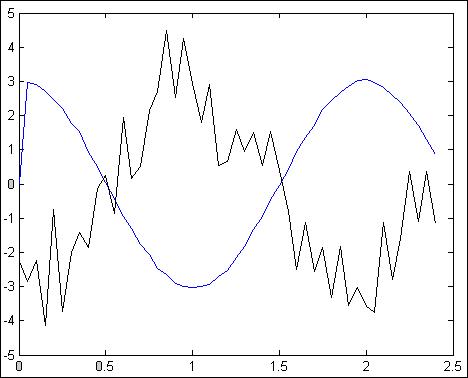
Рис.4.4.3. Зависимость при RC = 100
Данный фильтр имеет запаздывание, однако с регулировкой параметров возможно получение достаточно качественного отфильтрованного сигнала на выходе фильтра. При моделировании RC с помощью интеграторов на базе ОУ возможно получение коэффициента больше 1.
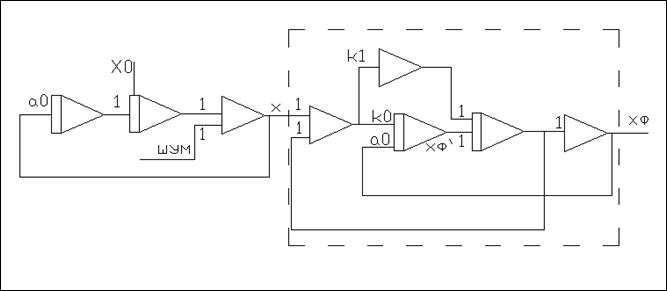
4.5. Параметрический фильтр
При данной фильтрации используется модель объекта(параметры объекта) – вид представлен на рис.4.5.1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.