Будуємо кінематичну групу для отримання формоутворювального руху Фv(В1). У простому формообразуєм русі внутрішній зв'язок забезпечується кінематичною парою: гільза шпінделя 3 і опора 4. А для отримання самого руху необхідне джерело руху - електродвигун Д.Для передачі руху необхідно крапку 5 пов'язати з крапкою 6. Для можливості отримання виконавчого руху з заданними параметрами в кінематичній групі необхідно розмістити органи настрою. Кількість настрою вальних параметрів залежить від характеру та змісту формотворчого руху. Рух простий із замкнутою траєкторією, тому настрою вальних параметрів буде два: швидкість та напрямок.Напрямок здійснюється реверсивним механізмом, швидкість забезпечується коробкою швидкостей iv.
Таким чином, отримана кінематична група, забезпечуюча отримання виконавчого руху Фv(В1) та маюча структурні порівняння зв’язку:
Внутрішній
зв’язок: 3 ![]() 4
4
Зовнішній
зв’язок: Д ![]() 5
5![]() Р
Р![]() iv
iv![]() 6
6![]() В1.
В1.
Роздивимось формоутворювальний рух Фs(П2). Будуємо кінематичну групу для отримання цього формоутворювального руху. ). У простому формообразуєм русі внутрішній зв'язок забезпечується кінематичною парою: піноль 7 та напрямна 8. Для отримання самого руху необхідне джерело руху - електродвигун Д. Для передачі руху необхідно крапку 5 пов'язати з крапкою 10. Для можливості отримання виконавчого руху з заданними параметрами в кінематичній групі необхідно розмістити органи настрою. Рух простий з незамкнутою траєкторією, тому настрою вальних параметрів буде чотири: шлях, початкове положення, швидкість та напрямок. Шлях та початкове положення не показують. Напрямок забезпечується реверсивним механізмом. Швидкість забезпечується органом настроювання – коробкою подач is.
Таким чином, отримана кінематична група, забезпечуюча отримання виконавчого руху Фs(П2) та маюча структурні порівняння зв’язку:
Внутрішній
зв’язок: 7![]() 8
8
Зовнішній
зв’язок: Д ![]() 5
5![]() р
р ![]() iv
iv
![]() 6
6 ![]() 9
9![]() is
is
![]() 10
10![]() ПтрZр
ПтрZр![]() П2.
П2.
Верстат за змістом формотворчої структури відноситься до класу E 2.2.
![]()
3 РОЗРОБКА КІНЕМАТИЧНОЇ СХЕМИ ВЕРСТАТА
Кінематична схема верстата – це сукупність конкретних схематичних зображень механізмів, з’єднаних послідовно та забезпечуючи необхідні рухи.
Основою для розробки кінематичної схеми верстата є отримана структурна схема. Умовні кінематичні зв’язки, виконані пунктирними лініями, на схемі необхідно замінити реальними механізмами, послідовно з’єднаними у кінематичні ланцюги.
Механізм
головного руху згідно виду структурної схеми повинен містити двигун Д (реверс
здійснюється реверсивним механізмом) та орган настроювання iv.
Орган настроювання iv
повинен бути показана коробкою швидкостей, яка має структурну формулу ![]() , тобто яка містить дві
групи передач та забезпечує отримання восьми ступенів частот обертання
шпинделя.
, тобто яка містить дві
групи передач та забезпечує отримання восьми ступенів частот обертання
шпинделя.
Передбачаючи можливість автоматичного керування циклом роботи верстата, розробляємо автоматичну коробку швидкостей обертання шпинделя в якому це здійснюється електромагнітними муфтами.
В якості джерела
руху приймаємо електродвигун Д. Для передання обертання від двигуна до коробки
швидкостей використовується пасова передача  та
реверсивний механізм
та
реверсивний механізм  ,
,  .
.
Таким чином, отримана кінематична схема привода головного руху (рис. 3.1), яка забезпечує отримання восьми ступенів частот обертання шпинделя.
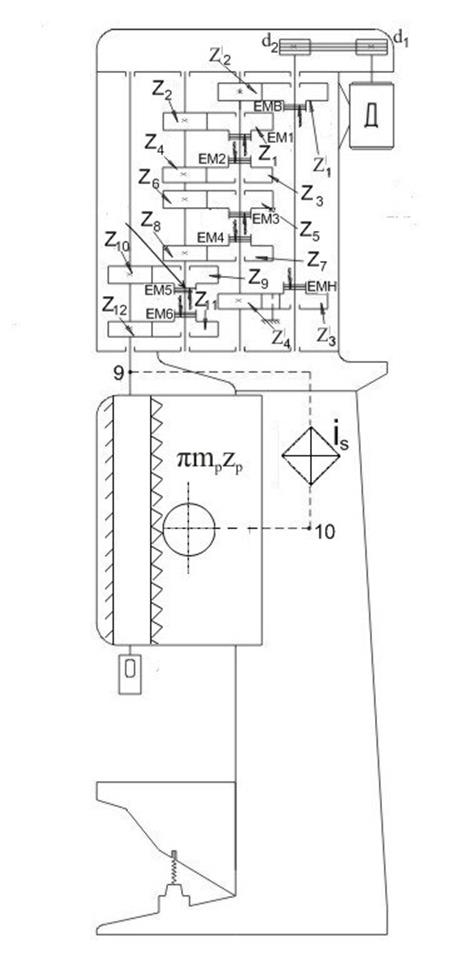
Рис. 3.1 Кінематична схема станка
4 КІНЕМАТИЧНИЙ РОЗРАХУНОК ПРИВОДУ ГОЛОВНОГО РУХУ
Привод головного руху – це сукупність механізмів, які забезпечують кінематичний зв’язок (передавання руху) від джерела руху до виконавчої ланки, яка виконує головний рух. Привод головного руху складається з джерела руху, органів настройки та виконавчої ланки. Привод повинен бути максимально простим містити мінімально кількість механізмів і при цьому всі вали повинні бути паралельними один до одного.
У верстатобудуванні існує два методи розрахунку передаточних відношень коробки швидкостей: аналітичний та графоаналітичний. На практиці використовується графоаналітичний метод, тому що він простий та має більшу наглядність, але його розуміння витікає із аналітичного методу.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.