1.4. Ортогональные проекции кривых линий
1.4.1. Кривую линию можно рассматривать как траекторию движения точки в пространстве или совокупность точек , удовлетворяющих определенному уравнению. Кривые линии подразделяются на плоские и пространственные, на алгебраические, трансцендентные и эмпирические, монотонные и составные ( рис.1.7 ).
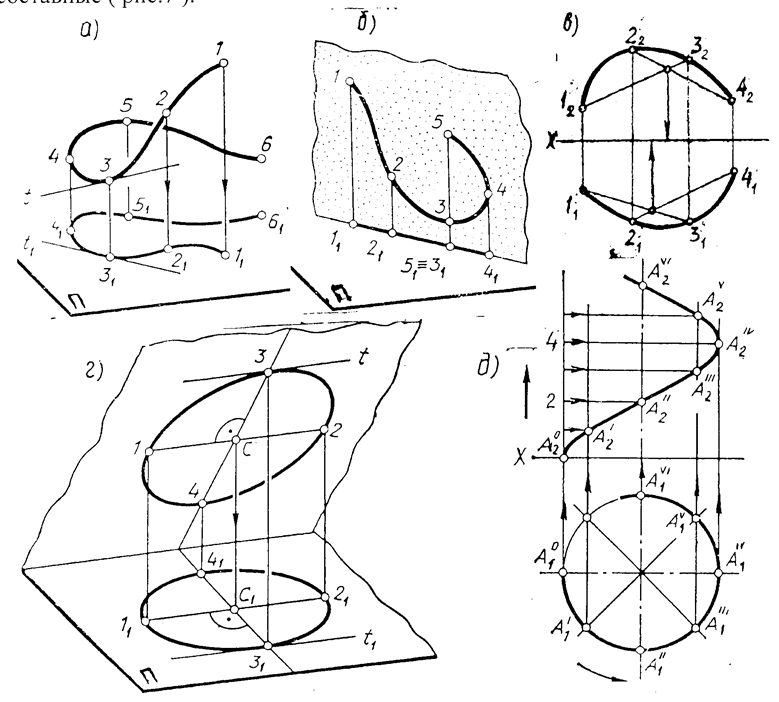
Рис 1.7. Изображения кривых линий: а, в – пространственных, б, г – плоских,
д – винтовой линии.
Для построения ортогональных проекций кривой нужно построить проекции ряда точек, принадлежащих этой кривой и соединить между собой одноименные проекции в той последовательности, в какой они находятся в оригинале. Чтобы решить по эпюру, какая кривая в натуре ( плоская или пространственная ), нужно произвольно провести две хорды. Если хорды пересекаются – кривая плоская, если скрещиваются – пространственная ( см. рис.1.7в ). Классическим примером плоской кривой является окружность, которая может проецироваться на плоскость в линию, в окружность и в общем случае в виде эллипса ( см. рис.1.7г ). При проецировании окружности любая пара ее взаимно перпендикулярных диаметров проецируется парой сопряженных диаметров эллипса. Диаметр (1-2) окружности, параллельной плоскости П проецируется без искажения и является для эллипса – проекции большой осью (11-21). Примером пространственной кривой является винтовая линия ( см. рис.1.7д ).
1.5. Ортогональные проекции поверхностей
Под поверхностью подразумевается непрерывное множество точек. Поверхности так же могут быть алгебраическими и трансцендентными.
Множество точек или линий, определяющих поверхность, называется ее каркасом.
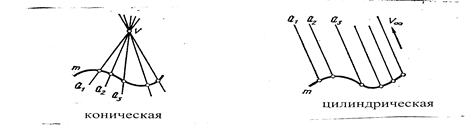
1.5.1. В начертательной геометрии поверхность рассматривается как совокупность всех последовательных положений некоторой линии, называемой образующей, перемещающейся в пространстве по определенному закону. Закон образования поверхности графически задается в виде линий образующих (l) и направляющих (m) .Этот способ образования поверхности называется кинематическим, а элементы поверхности – определителем.
1.5.2. Чтобы задать поверхность на чертеже, достаточно указать проекции ее определителя – образующих и направляющих (рис.1.8а ). В ряде случаев поверхность удобно задавать ее очерком – следом на плоскости проекций огибающей цилиндрической поверхности, а для поверхности вращения – осью вращения, проекциями экватора и главного меридиана ( рис.1.8б ).
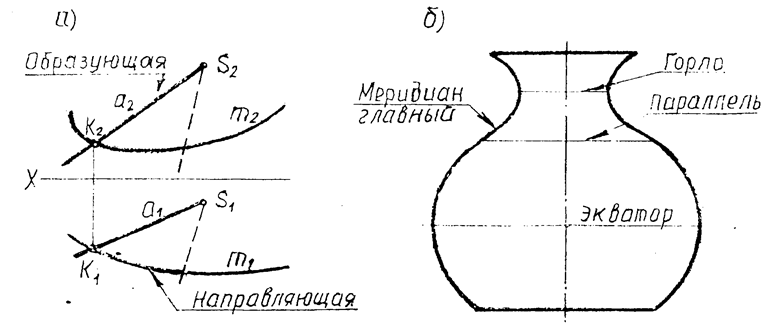
Рис 1.8. Изображения поверхности кинематическим способом и очерком поверхности вращения.
1.5.3. Многообразие форм поверхностей создает большие трудности при их анализе. В основу их систематизации может быть положено единство способа их образования – определитель: Ф (Г) [A].
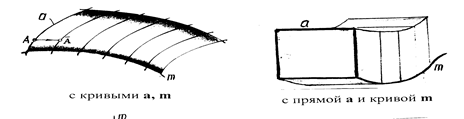
Геометрическая часть (Г) включает образующие – прямые (ā) и кривые (ã) линии. Криволинейные образующие могут быть постоянного и переменного вида. По этому признаку поверхности подразделяются на линейчатые и нелинейчатые. Первые могут иметь одну, две, три направляющие (m), которые также могут быть прямыми и кривыми линиями.
Алгоритмическая часть определителя [A] может содержать закон перемещения образующей и закон изменения формы образующей [ A1 ]. По этим признакам поверхности можно разделить на классы, подклассы, группы, виды. Некоторые из указанных поверхностей приведены в табл.1.5.
Таблица.1.5.
|
Поверхность класс, подкласс, вид определителя |
Наглядное изображение |
|
1. Поверхности нелиней- чатые (класс 1) с образующей перемен- ного вида Ф (ă,m) [A,A1] |
|
|
2. То же, с образующей постоянного вида Ф (ă,m) [A] |
|
|
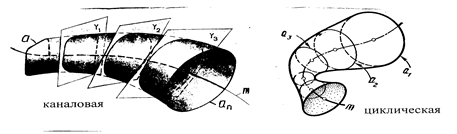
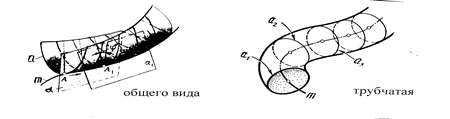
3. Поверхности линей- чатые (класс 2) с тремя направляющими Ф (ā,m1,m2,m3)...[A] |
|
|
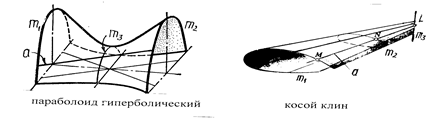
4. То же, с двумя направ- ляющими Ф (ā, m1,m2)...[A]
|
|
|
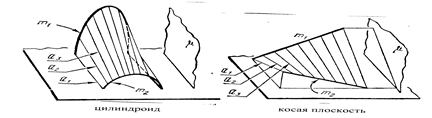
5. То же, с одной направ- ляющей Ф (ā, m) [A] |
|
|
6. Поверхности парал- лельного переноса (подкласс 1) Ф (ă,m) [A] |
|
|
7. Поверхности вращения (подкласс 2) Ф (а,m) [A] |
|
|
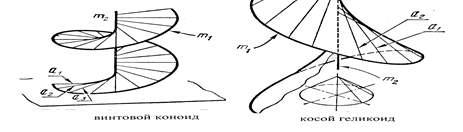
8. Винтовые поверхности (подкласс 3) Ф (ā, m1,m2) [A] |
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.