








Лабораторний практикум
по дисциплiнi
“Схемотехніка ЕОМ”
(з використанням пакету
Electronic Workbench)
Лабораторна робота № DE-6
Вивчення особливостей роботи і
використання скінченних автоматів
.2.1.Тактовані, синхронні скінченні втомати.
Кінцевими автоматами або послідовнісними машинами називаються цифрові схеми, стан виходів яких залежить не тільки від значень вхідних сигналів в даний момент часу, а й від внутрішнього стану схеми в даний та попередній момент часу.
З цього визначення випливає, що автомат має не один елемент пам’яті, інформація в яких залежить як від комбінації вхідних сигналів, так і від значення цієї інформації в попередні моменти часу. Аналогічний взаємозв’язок має місце і для вихідних сигналів. Таким чином, однією з особливостей цієї схеми є те, що вона мвє свій внутрішній стан, від якого залежить реакція на вхідні сигнали. Прикладом скінченого автомата може служити кодовий замок, реакція на вхідний сигнал якого залежить від внутрішнього стану, який, в свою чергу, залежить від попередніх сигналів.
Скінчені автомати можуть бути синхороними, зміна станів яких відбувається в тактові моменти часу, які задаються зовнішнім годинником. Асинхронні скінчені автомати змінюють свій стан в моменти зміни комбінації вхідних сигналів.
Розглянемо спочатку синхронні тактовані скінчені автомати, які являються найбільш простими для розуміння особливостей їх роботи і побудови. Поєднання слів тактовані і синхронні обумовлене тим, що тактованість передбачає, як вказувалось вище.що зміна стану автомати відбувається в відповідності до комбінації вхідних сигналів в такові моменти часу. Синхронність автомата говорить про те, що всі елементи пам’яті його – тригери- спрацьовують одночасно по заданих тактових сигналах.
 Тактовані синхронні сінченні автомати розділяються на
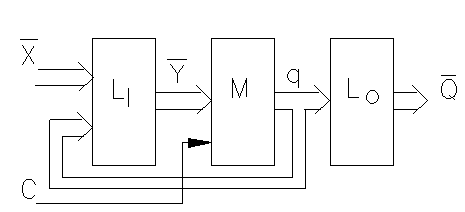
дві основні структури. Якщо значення виходів автомата залежать лше від його
внутрішнього стану, то такі автомати відносяться до автоматів Мура. Структурна
схема такого автомата приведена на рис. Комбінація вхідних сигналів, яка
представляється в вигляді вектора вхідних сигналів Х разом з сигналами q,
що подаються з внутрішньої пам’яті, діють на вхідну комбінаційну логіку LI , створюючи тим самим вихідний вектор Y.
Останній по тактовому сигналу С змінює стан внутрішньої пам’яті М, вихідні
сигнали якої q через вихідну логіку LO створюють вихідні сигнали автомата Q. Кількість внутрішніх
станів автомата визначається кількістю тригерів в модулі внутрішньої павм’яті
М.
Тактовані синхронні сінченні автомати розділяються на
дві основні структури. Якщо значення виходів автомата залежать лше від його
внутрішнього стану, то такі автомати відносяться до автоматів Мура. Структурна
схема такого автомата приведена на рис. Комбінація вхідних сигналів, яка
представляється в вигляді вектора вхідних сигналів Х разом з сигналами q,
що подаються з внутрішньої пам’яті, діють на вхідну комбінаційну логіку LI , створюючи тим самим вихідний вектор Y.
Останній по тактовому сигналу С змінює стан внутрішньої пам’яті М, вихідні
сигнали якої q через вихідну логіку LO створюють вихідні сигнали автомата Q. Кількість внутрішніх
станів автомата визначається кількістю тригерів в модулі внутрішньої павм’яті
М.
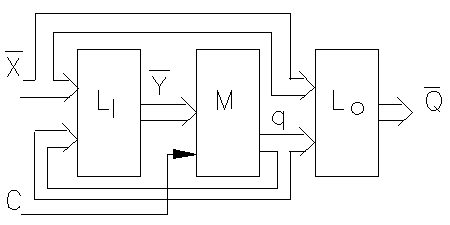
На відміну від автомата Мура, в автоматі Мілі ( рис. ) вихідний стан автомата після кожного тактового моменту визначається не лише взаємодією комбінації сигналів q з функцією вихідної логіки LO, а і безпосередніми значеннями вхідних сигналів.
В якості пристроїів внутрішньої пам’яті можуть використовуватись динамічні D- тригери, які можуть спрацьовувати як по фронту, так і по спаду синхросигнала. Також можуть бути використаними J-K динамічні тригери. Але при проектуванні таких схем слід враховувати особливості апаратних засобів,на яких буде забезпечуватись їх реалізація. Наприклад, при застосуванні програмуємих логічних матриць, слід використовувати динамічні D- тригери, які широко там застосовуються.
2.2. Особливості описання роботи автомата
Вузли комбінаційної схемотехніки забезпечують однозначну відповідність між вхідними змінними і вихідними функціями:
Yn = L1( Xn, qn );
Qn+1= LO( qn+1 ); ( 1c )
для автомата Мура і
Yn = L1( Xn, qn );
Qn+1 = LO( Xn, qn+1 ); ( 2c )
для автомата Мілі.
Рівняння (1с) і (2с) можуть можуть бути заданими аналітично, а бо в вигляді таблиць станів ( таблиць відповідності).
Взаємозв’язок між значеннями qn і qn+1 визначається характеристичними рівняннями використовуємих тригерів. В табл. приведені характеристичні рівняння тригерів, розглянутих в попередніх розділах.
Табл.
|
Тип використовуємого тригера. |
Характеристичне рівняння |
|
Асинхронний R-S тригер |
|
|
Синхронний статичний D-тригер |
|
|
Динамічний D- тригер |
|
|
Динамічний J-K тригер (J-K MS тригер) |
|
|
Т-тригер |
|
|
T- тригер з дозволяючим входом |
|
Поєднуючи характеристичні рівняння тригерів і рівняння станів комбінаційних вузлів можна провести аналіз роботи існуючого автомата, а розв’язувати задачі синтезу скінчених синхронних такованих автоматів по заданих алгоритмах їх функціювання.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.