Автомат Мура може бути отриманим, якщо вихідна логічна функція буде залежати лише від внутрішніх станів, тобто
![]() ,
,
 Розглянемо
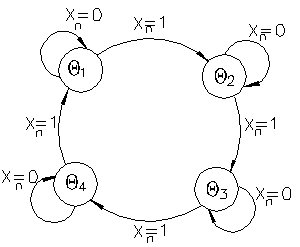
тепер графічну форму представлення автомата в вигляді граф-схеми (рис.4.сл4). В
розглянутому автоматі маємо лише один вхід з двома можливими значеннями, тому в
кожному стані відображаються лише дві стрілки. Якщо автомат має n
входів, то відповідно може бути 2n комбінацій і на кожен стан буде діяти 2n
стрілок.
Розглянемо
тепер графічну форму представлення автомата в вигляді граф-схеми (рис.4.сл4). В
розглянутому автоматі маємо лише один вхід з двома можливими значеннями, тому в
кожному стані відображаються лише дві стрілки. Якщо автомат має n
входів, то відповідно може бути 2n комбінацій і на кожен стан буде діяти 2n
стрілок.
Ще одною формою
представлення роботи автомата являються часові діаграми, які повинні
відображати зміну станів і появу вихідного сигналу в залежності від дії в часі
вхідних сигналів Сn і хn . Така часова діаграма приведена для
розглядаємого автомата на рис. 4.ск.5. Як 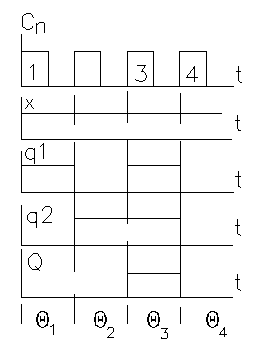 відображено на рисунку зміна станів автомата проходить
в моменти появи фронту синхросигналу, тобто в динамічному режимі, в той час, як
значення виходу автомата фіксується для статичного режиму.
відображено на рисунку зміна станів автомата проходить
в моменти появи фронту синхросигналу, тобто в динамічному режимі, в той час, як
значення виходу автомата фіксується для статичного режиму.
Розглянута схема автомата може бути дещо спрощоною за рахунок видалення інверторів, оскільки інверсні значення виходів тригерів можна отримувати безпосередньо з самих тригерів.
Таким чином з проведеного аналізу витікає слідуюча послідовність кроків при аналізі роботи і проектуванні синхронного автомата.
1. Формуються рівняння станів для керування D- тригерами.
2. Формуються рівняння переходів на основі алгоритмів функціювання вибраних типів тригерів.
3. Використовуються рівняння переходів для побудови таблиці переходів.
4. Формується рівняння виходу.
5. Поєднується рівняння виходу з таблицею переходів.
6. будується граф-схема автомата і аналізується її робота на предмет відповідності таблиці переходів.
7. Будується часова діаграма роботи автомата і перевіряється її відповідність раніше визначеним критеріям.
2.3. Асинхронні автомати.
Особливість асинхронних автоматів полягає в використанні асинхронних тригерів, стан яких змінюється при подачі сигналів установки або збросту.
Для пояснення особливостей роботи таких автоматів спрбуємо побудувати простий автомат для вирішення конкретної задачі. Кожен автомат створюється для вирішення конкретних задач і спочатку завдання на створення автомата
формується в словесному вигляді.
Приклад. На стрічці конвейєра рухаються деталі А, В та С в невпоряд-
кованій послідовності. Необхідно створити автомат для комплектації деталей
трійками в послідовності АВС , АВС, ... Послідовність виконання операцій наступна:
після першої вибраної з конвейєра деталі автомат повинен пропускати решту подібних деталей до появи деталі В. Після цього пропускати деталі А та В до появи деталі С. Після вибору деталі С автомат повинен перейти в вихідний стан та почати роботу знову. Не будемо зупинятись на тому, як автомат розпізнає або відрізняє одну деталь від іншої. Вони можуть бути, наприклад, різної висоти і виділятись з допомогою допоміжної комбінаційної схеми.
Те, що запропонована для розробки схема є автоматом не повинно викликати сумніву тому що реакція на появу, наприклад, деталі В повинна бути різна до зняття деталі А та після її зняття.
Першим етапом проектування є формалізація завдання. Цей етап зекінчується
створенням структурної схеми автомата, що наводится на рис.26
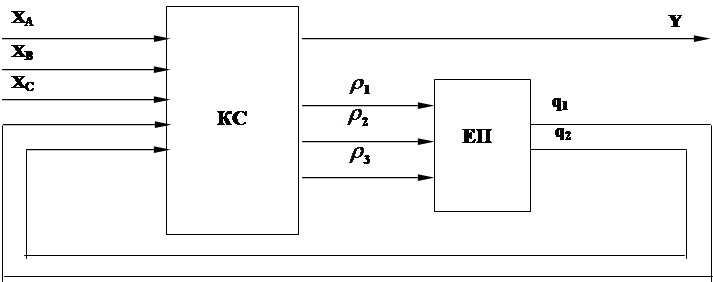
Рис.26
Сигнали ХА, ХВ, ХС послідовно але ен впорядковано діють на комбінаційну схему.
Вона повинна спочатку відреагувати тільки на сигнал ХА після чого подати сигнал
на вихід Y для зняття деталі та
сигнал![]() , для запам’ятовування виконаної операції.
, для запам’ятовування виконаної операції.
Сигнал q1 з елемента пам’яті змінює алгоритм роботи комбінаційної схеми, після
чого остання повинна відреагувати тільки на сигнал В, видавши відповідний
сигнал на вихід Y та ![]() 2 на ЕП. Після цього створюється
сигнал q2,
що знову
2 на ЕП. Після цього створюється
сигнал q2,
що знову
змінює алгоритм роботи комбінаційної схеми, яка наряду з сигналом Y повинна
видати сигнал![]() 3 для повернення ЕП у вихідний
стан.
3 для повернення ЕП у вихідний
стан.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.