Аналіз роботи автомата виконується з метою визначення стану в послідуючий тактовий момент часу і передбачення послідуючих станів. Аналіз роботи автомата являється достатньо складною задачею, особливо при відсутності досвіду, тому рекомендується робити це поетапно, або крок за кроком. В такому плані рекомендуються слідуючі кроки:
· Визначення станів на слідуючому тактовому моменті часу і значень виходів вхідної і вихідної комбінаційних функцій LI , LO;
· Використання функцій LI , LO для побудови таблиці станів, що повністю визначає слідуючий стан і значення виходу схеми для кожної комбінації поточного стану і входів;
· Побудова діаграми тсанів, що містить в собі інформацію з попереднього кроку в графічній формі.
В яості прикладу проведемо аналіз роботи схеми скінченого автомата з двома D- тригерами, що приведена на рис.
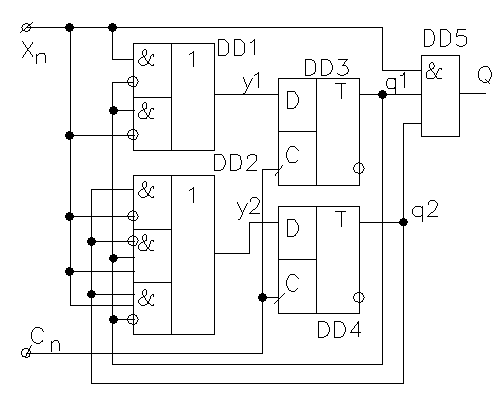 Не знаючи деталей
роботи схеми можемо визначити, що вхідна комбінаційна схема LI представлена двома мікросхемами DD1 і DD2, входами яких являється вхідний сигнал Xn і сигнали, що визначають внутрішній стан автомата q1, q2.
Виходами L1 являються сигнали у1 і у2. В якості елементів
внутрішньої пам’яті використовуються два динамічні D- тригери
DD3 і DD4. Вихідна комбінаційна
схема LO представлена
трьохвходовим елементом 3І на мікросхемі DD5.
Не знаючи деталей
роботи схеми можемо визначити, що вхідна комбінаційна схема LI представлена двома мікросхемами DD1 і DD2, входами яких являється вхідний сигнал Xn і сигнали, що визначають внутрішній стан автомата q1, q2.
Виходами L1 являються сигнали у1 і у2. В якості елементів
внутрішньої пам’яті використовуються два динамічні D- тригери
DD3 і DD4. Вихідна комбінаційна
схема LO представлена
трьохвходовим елементом 3І на мікросхемі DD5.
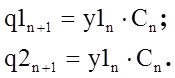
Тепер розглянемо поведінку схеми в роботі. При подачі синхросигналу Сn по його фрону кожен з тригерів відкриває свй D- вхід і передає його значення на вихід, що відповідає характеристичному рівнянню тригерів. Cигнали у1 і у2 являються встановлюючими (збуджуючими ( excitation)) для D- тригерів в кожний тактовий момент часу. Логічні рівняння, що визначають встановочні сигнали, як функції поточного стану і вхідних сигналів називаються встановочними рівняннями (excitationequation) і можуть біти отримані з схеми:
![]()
![]()
Використовуючи характеристичне рівняння D-тригерів, можемо записати слідуючі рівняння:
 (
3с )
(
3с )
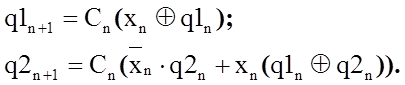
підставляючи значення у1n і у2n з встановочних рівнянь, отримаємо:
![]()
 ( 4с )
( 4с )
![]()
Отримані рівнянн(4с), які виражають значення стану автомата в n+1 момент часу в залежності від значень входів і поточного стану називаються перехідними рівняннями. Їх суть полягає в тому, що вони дають можливість переджбачити стан автомати в n+1 момент часу на основі інформації про стан і значення входів в n- й мометн часу.
Так як внутрішній стан автомата визначається значеннями виходів двох тригерів, то, відповідно, можна стверджувати, що існують лише 4 можливих стани автомата: (q1, q2) = 00,01,10,11. Для кожного стану в розглядяємому прикладі можливі лише два значення входу х: 0,1, так, що в загальному плані маємо лише 8 стан/ вхід комбінацій. ( В загальному плані автомат з s станами і k входами має 2 s+k стан/ вхід комбінацій).
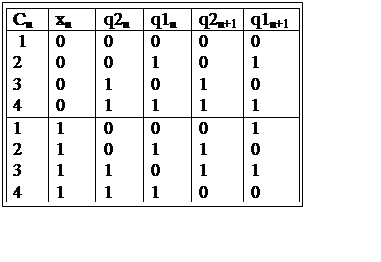 Табл.4с.1 показує таблицю переходів
скінченного автомата, яка побудована на основі аналізу рівнянь переходів для
кожного з станів. З таблиці переходів витікає особливість роботи автомата, яка
полягає в тому, що при хn = 0 його внутрішні стани не змінюються, а
при хn = 1 він виконує функцію двійкового лічильника, тобто
сигнал хn являється таким, що забезпечує дозвіл ролботи схеми,
як двійкового лічильника з максимальним значенням 11 =3.
Табл.4с.1 показує таблицю переходів
скінченного автомата, яка побудована на основі аналізу рівнянь переходів для
кожного з станів. З таблиці переходів витікає особливість роботи автомата, яка
полягає в тому, що при хn = 0 його внутрішні стани не змінюються, а
при хn = 1 він виконує функцію двійкового лічильника, тобто
сигнал хn являється таким, що забезпечує дозвіл ролботи схеми,
як двійкового лічильника з максимальним значенням 11 =3.
В практиці проектування скінчених автоматів кожному з внутрішніх станів приписують конкретну назву, або конкретне позначення. Зробимо для розглядаємого автомата ,наприклад, такі позначення: q0=00; q1=01;q2=10; q3=11. Тоді таблиця станів дещо зміниться і прийме слідуючий вигляд: ( див. Табл.4.с2)
Табл.4.с2
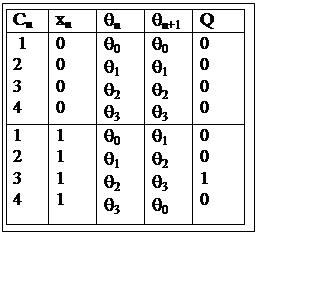 Вихідний сигнал автмата визначається
внутрішнім його станом і значенням вхідного сигналу і в відповідності до
функції LO маємо
Вихідний сигнал автмата визначається
внутрішнім його станом і значенням вхідного сигналу і в відповідності до
функції LO маємо
![]() ,
,
а автомат характеризується як автомат Мілі.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.