МІНІСТЕРСТВО ОСВІТИ ТА НАУКИ УКРАЇНИ
СУМСЬКИЙ ДЕРЖАВНИЙ УНІВЕРСИТЕТ
Кафедра КСУ
Звіт
по лабораторній роботі № 3
«Визначення стійкості нелінійних систем за критерієм Попова»
Виконав Студент групи СУ-42
Глушан В.О.
Перевірив Журба В.О
Суми 2008
Тема: Визначення стійкості нелінійних систем за критерієм Попова
Мета роботи – навчитися будувати модифіковану АФЧХ (криву Попова) лінійної частини системи в Matlab, визначити стійкість системи за критерієм Попова
Теоретичні відомості
Критерій Попова встановлює умови абсолютної стійкості. Абсолютна стійкість означає асимптотичну стійкість нелінійної системи у цілому (тобто відносно всього простору станів системи) за умови, що задано не конкретну не лінійність, а деякий клас нелінійностей М. Критерій Попова можна застосувати до класу стаціонарних нелінійностей, яким є множина М[k1, k2] усіх кусково-безперервних функцій, графіки яких знаходяться в секторі S[k1, k2] між лініями u = k1ε та u = k2ε (рис. 11). Ці нелінійності повинні задовольняти такі умови:
φ(ε) – безперервна функція, φ(0) = 0;
![]() ε φ(ε) >
0 при ε = 0;
ε φ(ε) >
0 при ε = 0;
 при
при ![]() ;
;
Абсолютна стійкість означає стійкість у цілому для всіх нелінійностей заданого класу.
Перед тим, як навести критерій Попова, введемо поняття прямої та кривої Попова. Прямою Попова називається пряма, що
проходить у комплексній площині через точку з координатами (-1/k; 0j) і має кутовий коефіцієнт 1/q. Коефіцієнт k для однозначних нелінійностей (тобто для нелінійностей, характеристики яких містяться в секторі S[0, k]) визначається з умови:
 .
.
|
|
|
Рисунок 1 – Нелінійні характеристики, що належать сектору S[k1, k2]
Іншими словами, коефіцієнт k – верхня границя сектора, якому належить характеристика нелінійності.
Кутовий коефіцієнт 1/q визначається типом нелінійності, і для однозначних нелінійних характеристик параметр q вибирається з діапазону - ∞ < q < ∞, тобто пряму Попова можна проводити з будь-яким кутовим коефіцієнтом – як додатним, так і від’ємним.
Введемо тепер поняття видозміненої (модифікованої) частотної характеристики лінійної частини системи, або кривої Попова:
Wл*(jω) = Uл (ω) + jωVл(ω)
Вираз цієї характеристики: відрізняється від звичайної амплітудно-фазової характеристики Wл(jω) тільки тим, що уявна частина множиться на ω. Видозмінена характеристика Wл*(jω) має такий самий вигляд, що й характеристика Wл(jω), тільки масштаб уявної частини змінюється у ω разів.
Сформулюємо тепер критерій Попова, або умови абсолютної стійкості: нелінійна система абсолютно стійка, якщо в площині Wл*(jω) можна провести пряму Попова так, щоб крива Попова була праворуч від неї. Якщо таку пряму Попова провести неможливо, то абсолютна стійкість у досліджуваній системі неможлива.
Хід роботи
1. Зберемо схему для побудови кривої Попова.
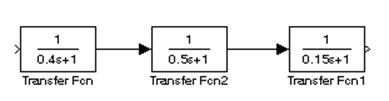
Схема лінійної частини системи має вигляд:
Характеристики нелінійної ланки та її параметри наведені нижче:
|
b = 1; c= 4
Для побудови кривої Попова необхідно виділити дійсну і уявну частину лінійної частини, після чого отримати модифіковану частотну характеристику лінійної частини системи.

Зробимо заміну ![]()

Помноживши чисельник та знаменник на вираз, комплексно зв'язаний зі знаменником, отримаємо вирази дійсної та уявної частин модифікованої амплітудно-фазової характеристики Wл(jω):


На основі отриманих результатів побудуємо криву Попова. Для цього зберемо в системі Matlab наступну схему:
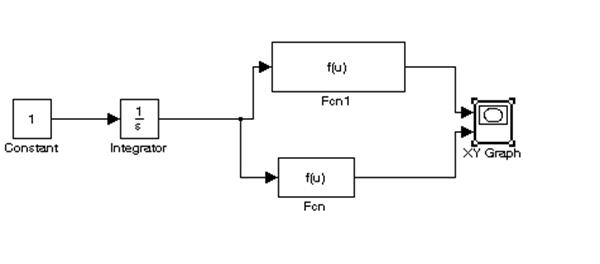
На цій схемі Fcn(u) - дійсна частин, Fcn1(u) – модифікована уявна частина модифікованої амплітудно-фазової характеристики Wл(jω). Провівши моделювання отримаємо криву Попова наступного вигляду:
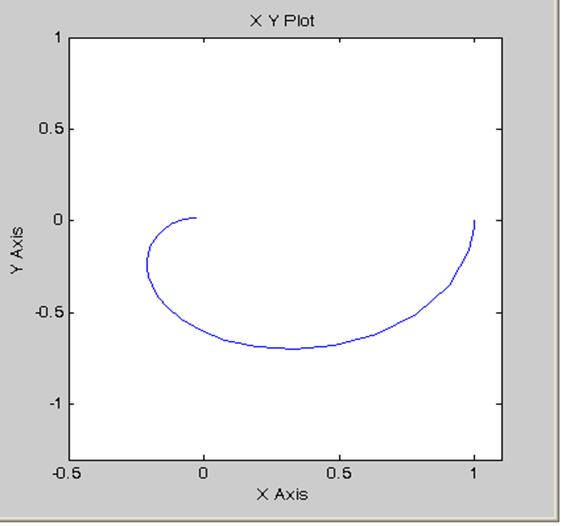
Рисунок 2 – крива Попова
Використавши задані параметри нелінійної ланки знайдемо координати точки, через яку проходить пряма Попова:
 ,
,
Отже k=0,25. Тому точка, через яку
проходитиме пряма Попова буде мати координати: (![]() ).
).
Проведемо в площині W*л(w)=X+jY пряму Попова. Нелінійна система буде абсолютно стійкою, якщо в площині Wл*(jω) можна провести пряму Попова так, щоб крива Попова була праворуч від неї. Якщо таку пряму Попова провести неможливо, то абсолютна стійкість у досліджуваній системі неможлива. Як бачимо з рисунку для даної системи вищеназвана умова стійкості виконується. Отже задана система є абсолютно стійкою.
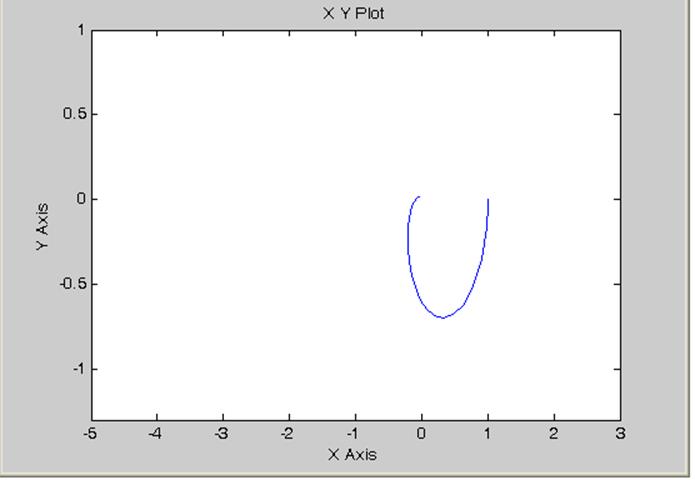
Рисунок 3 – Крива і пряма Попова
Висновок: виконавши лабораторну роботу, ми навчитися будувати модифіковану АФЧХ (криву Попова) лінійної частини системи в Matlab. Визначили за критерієм Попова, що задана система абсолютно стійка.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.