МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ТУЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
КАФЕДРА “АВТОМАТИЗИРОВАННЫЕ СТАНОЧНЫЕ СИСТЕМЫ”
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе по дисциплине
«Управление техническими системами»
на тему:
«СИСТЕМА УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБЪЕКТОМ»
Автор работы _______________________________ (подпись) (инициалы, фамилия)
Группа
Руководитель работы ____________________________________
(подпись, дата, инициалы, фамилия)
Работа защищена ____________________________________
(дата)
Члены комиссии _____________________________________
(подпись, дата, инициалы, фамилия)
________________________________
________________________________
(подпись, дата, инициалы, фамилия)
Тула 2009
Содержание
Бланк задания
1. Исходные данные……………………………………………….3
2. Анализ кинематики станка……………………………………..4
3. Функциональная схема СЧПУ…………………………………7
4. Схемы электроавтоматики и подключения СЧПУ к станку…10
5. Разработка цикла позицирования………………………………14
Заключение…………………………………………………………17
Библиографический список……………………………………….18
1. Исходные данные.
P = N = 2
2 = 10 · 0 + 0
|
D0 |
D1 |
D2 |
D3 |
D4 |
D5 |
|
0 |
0 |
0 |
0 |
1 |
0 |
0![]() = 2-10
= 2-10
Согласно заданию, выбираем датчик обратной связи: сельсин БС-155, величина дискреты ∆=0.005 мм/об, цена оборота датчикаh=2мм/об; тип интерфейса связи со станком –ИЭКА; тип цикла позиционирования ступенчатый.
Тип базовой УЧПУ: «Электроника НЦ-80»; рабочая подача 1,2 м/мин, скорость быстрых ходов 4,8 м/мин; величина максимального перемещения 500мм.
Для систем с мультиплексированной
шиной адрес внешних устройств принимаем равным А![]() =А
=А![]() +X
+X![]() =
15,76+1=16,76.
=
15,76+1=16,76.
А![]() -
начальный адрес, закрепленный за внешними устройствами в данной СЧПУ.
-
начальный адрес, закрепленный за внешними устройствами в данной СЧПУ.
Х![]() =N
=N![]()
Принимаем допущение, что система управления с разомкнутой главной обратной связью описывается передаточной связью описывается передаточной функцией, имеющей первый порядок астатизма.

где к – коэффициент усиления системы по одной из координат, 1/с;
Т – коэффициент времени системы, с.
С целью сохранения устойчивости и обеспечения колебательного переходного процесса принимаем
k = 100 +
5n, с![]()
k = 100 +
5·2 = 110 с![]()
Т = 0,5(l + 1)·10![]() ,
c
,
c
Т = 0,5(0+ 1)·10![]() = 0,05 c
= 0,05 c
2. Анализ кинематики станка.
Рассмотрим кинематическую схему токарно-винторезного станка с ЧПУ 136, (рис. 1).
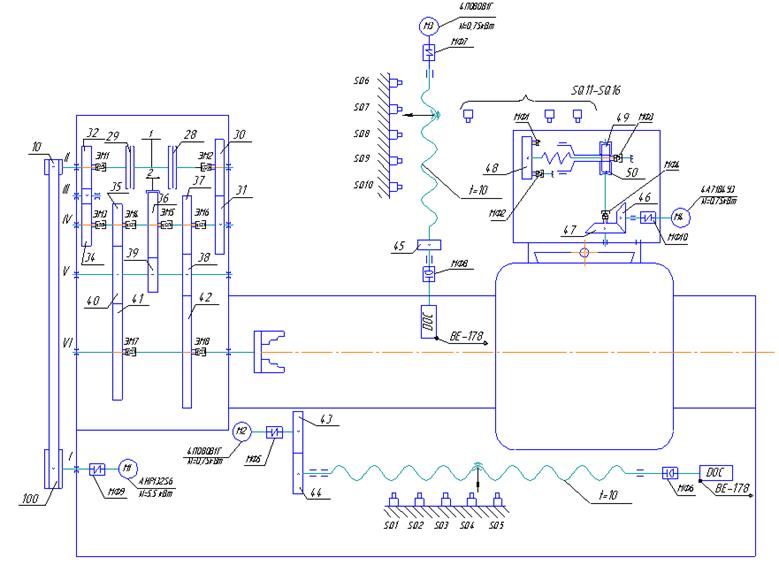
Рис.1
Кинематическая схема состоит из следующих цепей:
- вращение шпинделя – главное движение М1;
- продольный привод М2;
- поперечный привод М3;
- охлаждение М6.
В качестве привода главного движения и приводов подач используется комплексный электропривод ЭТЗИ.
Токарный станок 136 имеет компоновку с горизонтальными направляющими. На станке располагается шпиндельная бабка с коробкой скоростей, револьверная головка. Станок имеет две управляемые координаты: Z – продольное перемещение; Х – поперечное перемещение. На каждом ходовом винте установлен датчик типа ВЕ-178.
Привод главного движения состоит из электродвигателя постоянного тока мощностью 5,5 кВт, коробки скоростей и шпинделя осуществляется при помощи датчика резьбонарезания типа ВЕ-178.
Смена инструмента револьверной головки на 6 инструментах происходит при помощи электродвигателя М4.
Привод главного движения – электродвигатель М1, частотно – регулируемый асинхронный (в некоторых конструкциях – регулируемый постоянного тока). По сравнению со станком с ручным управлением кинематическая схема существенно упрощена. От двигателя М1 посредствам поликлиновой ременной передачи (со шкивами диаметром 105 и 264мм) вращение передается на вал II, а затем через зубчатые колеса 32 и 34 на вал III и т. д.
Цепь поворота шестипозиционной револьверной головки: асинхронный электродвигатель М4 – зубчатые колеса 46 и 47 – червяк 49 – червячная шестерня 50.
Станок оснащен трехкулачковым патроном с электромеханическим приводом зажима заготовки. Кулачки патрона перемещаются в радиальном направлении в результате поступательного движения клина, связанного с тягой, которая через пакет тарельчатых пружин связана с тягой. Последняя соединена винтом – штоком с электромеханическим устройством, представляющим собой специальный асинхронный электродвигатель, в якорь которого встроена гайка. При вращении якоря винт – шток перемещается в продольном направлении, приводя в движение тягу. Чем больше путь перемещения этой тяги, тем больше сила сжатия пакета пружин и, следовательно, сила зажима патрона, которая регулируется перемещением путевых переключателей.
Для получения автоматических циклов обработки в приводах главного
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.