>> Lu=[-4.5; -1.0; -0.2; -1.2];p=poly(Lu);pu=[p(5); p(4); p(3); p(2)]
pu =
1.0800
7.6200
12.4400
6.9000
Параметры модального регулятора, задаются вектором k:
>> k=inv(Q')*(a-pu)
k =
0.0463
1.0864
-2.5544
12.2447
Матрица замкнутой системы ![]() :
:
>> Az=A+B*k'
Az =
-3.1792 3.6213 -8.5145 -0.8514
3.3333 -3.3333 0 0
1.3333 -1.1333 -0.2000 0
0 0 0.1250 -0.1875
Для обеспечения заданного
значения управляемой переменной найдем величину необходимого коэффициента
усиления ![]() :
:
>> ku=1/(C*inv(-Az)*B)
ku =
3.8880
Проделанные вычисления позволяют реализовать моделирование процессов в среде Simulink.
2.2. Исследование линейной непрерывной системы с модальным регулятором
На рис.1 представлена блок-схема моделируемой системы.
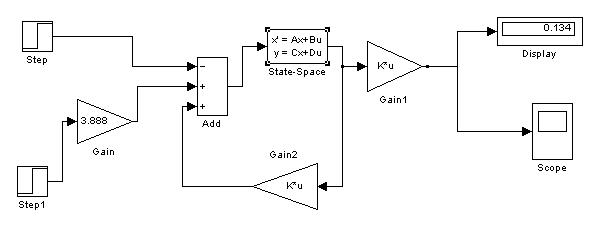
Рис. 1
Блок Space
соответствует объекту управления, однако, предполагает некоторую особенность
задаваемых параметров блока. В связи с тем, что стабилизация системы
осуществляется в функции от вектора состояния и выходной сигнал этого блока
равен ![]() , параметры C
и D задаются как
, параметры C
и D задаются как ![]() .
Блок Gain 1 предназначен для формирования управляемой
переменной
.
Блок Gain 1 предназначен для формирования управляемой
переменной ![]() , что приводит к заданию параметров
блока
, что приводит к заданию параметров
блока ![]() . Блок Gain2,
включенный в цепь обратной связи, должен иметь параметры, определенные как
параметры регулятора
. Блок Gain2,
включенный в цепь обратной связи, должен иметь параметры, определенные как
параметры регулятора ![]() . Блок Step
1 предназначен для формирования заданного значения управляемой переменной.
Усилитель Gain реализует коэффициент передачи
. Блок Step
1 предназначен для формирования заданного значения управляемой переменной.
Усилитель Gain реализует коэффициент передачи ![]() . Step
отражает подачу нагрузки (возмущение) на систему.
. Step
отражает подачу нагрузки (возмущение) на систему.
1. Отработка ненулевых начальных условий.
Необходимо выбрать для вектора ![]() такое значение, чтобы оно
соответствовало постоянной величине управляемой переменной
такое значение, чтобы оно
соответствовало постоянной величине управляемой переменной ![]() . Величина уставки и возмущения
нулевые:
. Величина уставки и возмущения
нулевые: ![]() ,
, ![]() .
.
Поскольку в данной модели
четвертая компонента вектора совпадает с управляемой переменной, то задаем ![]() . График процесса, полученный при
исследовании заданной модели, представлен на рис. 2.
. График процесса, полученный при
исследовании заданной модели, представлен на рис. 2.
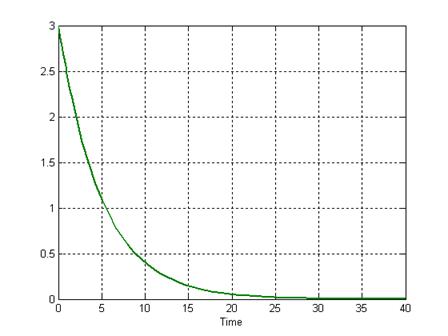
Рис. 2
Сравним этот график с результатом функции initial пакета MatLab, представленном на рис. 3.
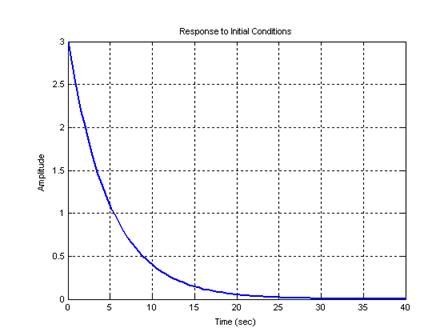
Рис. 3
Очевидно, что графики на рис. 2 и 3 совпадают.
2. Ступенчатое изменение уставки
Исследуем модель со следующими
свойствами: ![]() ,
, ![]() ,
, ![]() .
.
График исследуемого процесса представлен на рис. 4
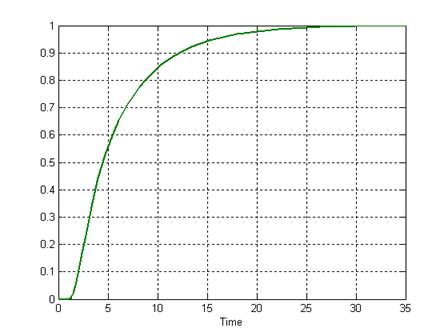
Рис. 4
График этого же процесса, полученный при помощи функции step, представлен на рис. 5.
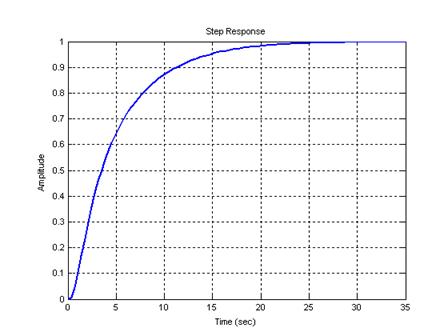
Рис. 5
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.