Но вскоре вскрылись недостатки ламповых систем управления. Громоздкие, хрупкие, потребляющие огромное количество электроэнергии, они выигрывали у своих электромеханических предшественников только по скорости, а по некоторым параметрам даже проигрывали.
Революцию в мире управляющих систем произвело изобретение полупроводниковых радиоэлектронных элементов, в частности транзистора. Габариты, масса и потребление энергии системами управления стало стремительно падать, в то время как скорость, надежность и качество систем резко возросло. Были разработаны микросхемы, что опять значительно уменьшило габариты систем.
Еще один скачок в развитии систем управления был связан с широким внедрением цифровой техники взамен аналоговых устройств. Резко возросла точность систем. Применение цифровых элементов позволяет внедрять очень гибкие решения, известные прежде лишь математике. Значительно упрощается конструирование и настройка таких систем, т. к. существует множество стандартных решений, а цена элементной базы постоянно снижается.
Разработка программируемых устройств (микропроцессоров) позволило достичь небывалой функциональности и универсальности цифровых схем всего на нескольких корпусах, требовавшей при реализации на жесткой логике огромных аппаратурных затрат. При сегодняшнем уровне развития науки и техники применение микропроцессоров в системах управления является самым оптимальным решением, оправдывающем критерии экономической целесообразности, технической эффективности и надежности.
В данном курсовом проекте предлагается разработать микропроцессорную управляющую систему, осуществляющую управление некоторым объектом. В качестве анализируемых данных и выходных воздействий используются цифровые и аналоговые величины. Система должна на основании входных величин выработать выходные воздействия а основании заданного алгоритма. Также система должна предусматривать возможность прерываний по аварии, запросу оператора и внешней ЭВМ.
Для аппаратной реализации системы оптимальнее всего выбрать элементную базу микросхем серии КР580, специально предназначенную для . Несмотря на то, что данная серия является морально и технически устаревшей, ее применение обусловлено во-первых, низкой стоимостью комплекта при достаточно высоких для большинства применений характеристиках, а во-вторых – развитыми средствами проектирования и множеством успешно опробованных и эксплуатируемых наработок и решений.
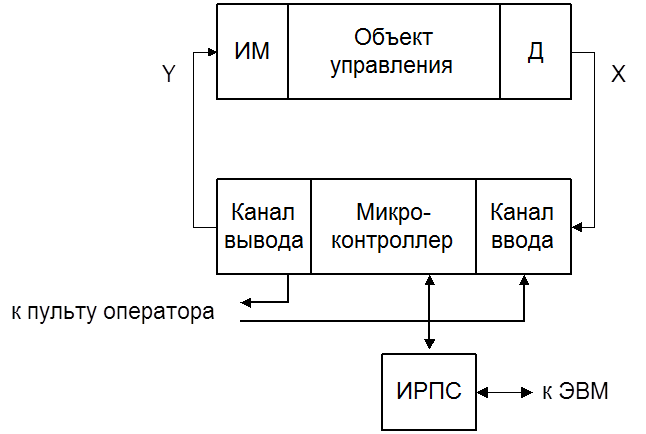 |
Рисунок 1. Схема управления объектом при помощи МПС.
Микропроцессорная система принимает информацию X об объекте управления от аналоговых и цифровых датчиков (Д), вырабатывает управляющие воздействия Y в соответствии с законом управления и подает их на исполнительные механизмы (ИМ). Датчики и исполнительные механизмы служат таким образом устройствами сопряжения управляющей системы с объектом управления.
Микропроцессорная система включает в себя микроконтроллер, осуществляющий заданный алгоритм работы, и каналы ввода-вывода, при помощи которых осуществляется обмен исходной и исполнительной информацией с объектом управления. Дополнительно в каналам ввода-вывода подключается пульт оператора, позволяющий управлять работой системы и получать необходимую информацию о ее работе. С помощью последовательного канала связи (радиального интерфейса ИРПС) МПС может передавать обработанную информацию ЭВМ более высокого уровня по ее запросу.
Входными сигналами для микропроцессорной системы являются:
- сигналы цифровых двоичных датчиков X1-X4
- сигналы аналоговых датчиков V1-V3
- 8-разрядный двоичный код уставки с пульта оператора
- сигналы сбоя источника питания, аварии, запроса оператора
Выходными сигналами, формируемыми системой, будут:
- цифровые сигналы Y1-Y3
- аналоговый сигнал Y4
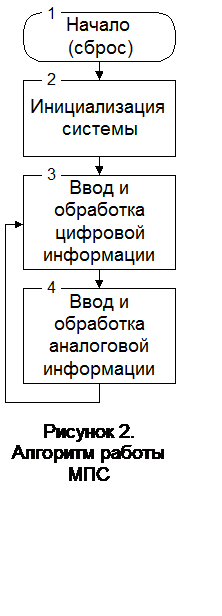 Упрощенный алгоритм работы микропроцессорной
системы представлен на рисунке 2.
Упрощенный алгоритм работы микропроцессорной
системы представлен на рисунке 2.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.