Законы управления для регулирующих
устройств.
Для регулирующих устройств (регуляторов) характерным является использование как простых законов регулирования, к которым относятся пропорциональный, интегральный и дифференциальный законы управления, так и сложных регуляторов, реализующих пропорциональный - интегральный закон управления и интегрально-пропорционально-дифференциальный закон сразличными сочетаниями коэффициентов этих законов.
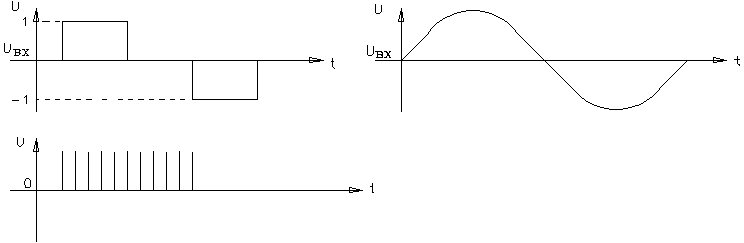
Характеристики регулирования устройств анализируются на примере реакции таких устройств на ступенчатое единичное воздействие, или гармоническое синусоидальное воздействие или воздействие в виде коротких импульсов постоянной амплитуды.
1. Пропорциональный закон управления.
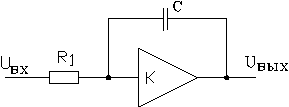
Наиболее просто этот закон реализуется на безинерционном усилительном звене, которое в общем случае является обычным ОУ, с коэффициентом усиления, определяемым отношением сопротивлений в цепи О.С. и во входной цепи.

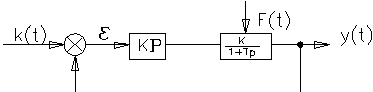
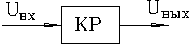
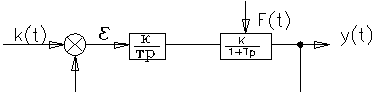
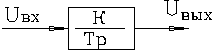
Структурная схема САР реализующей пропорциональный закон
управления будет иметь следующий вид
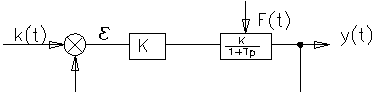
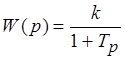
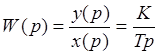
С точки зрения автоматического управления большинство объектов регулирования представляют собой апериодические звенья 1 порядка с передаточной функцией
Примерами таких регулирующих звеньев являются усилители разного рода, потенциометры , рычажные и зубчатые передачи и т.д.
Выделим регулятор , подаем на вход регулирующие воздействия в виде единичного ступенчатого воздействия
 Уравнения этого РУ будет иметь вид
Уравнения этого РУ будет иметь вид ![]() .
.
Обозначим![]()
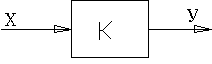
Тогда выражение передаточной функции РУ
Реакция регулирующего устройства может быть
представлено в следующем виде
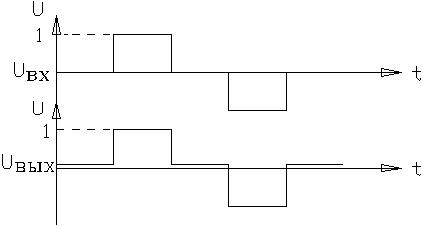
Хотя
K называется коэффициентом усиления, но на практике К может
быть больше и меньше 1. Поскольку отсутствует сдвиг по времени между входным
и выходным сигналами этот коэффициент показывает соотношение между ![]() . Такие регуляторы имеют большое
быстродействие. Обозначают эти РУ как П- регулятор или
пропорционатор.
. Такие регуляторы имеют большое
быстродействие. Обозначают эти РУ как П- регулятор или
пропорционатор.
Характерная особенность П-регулятора - наличие сигнала рассогласования для управляющего воздействия
Вследствии этого возникает противоречие между погрешностью ррегулирования e , коэффициентом усиления К и устойчивостью системы автоматического регулирования.
Системы с П- регуляторами всегда имеют погрешность регулирования и зону нечувствительности.
2. Дифференциальный закон управления.
Структурная схема САР с дифференциальным законом управления будет иметь вид
Операторное уравнение этого РУ, выражение передаточной функции и представление РУ в виде динамического звена показано ниже
![]()
Реакция РУ с дифференциальным законом управления на ступенчатое единичное воздейстие будет иметь вид
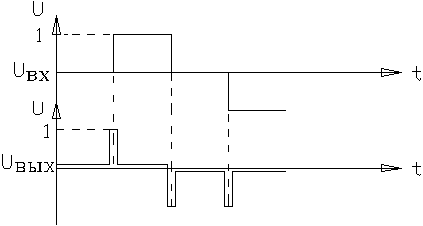
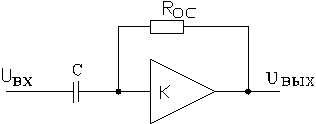
Дифференцирующее регулирующее устройство может быть построено на OY с конденсатором на входе и сопротивлением в цепи ОС.
В
момент скачка входного сигнала напряжения на выходе идеального Д-регулятора
стремится к ¥, а затем к
0. В реальных схемах ![]() не достигает ¥ из-за паразитной постоянной
времени и внутреннего сопротивления источника питания .
не достигает ¥ из-за паразитной постоянной
времени и внутреннего сопротивления источника питания .
В реальной схеме имеет место скачок ![]() до некоторого значения,
а затем возврат к 0.
до некоторого значения,
а затем возврат к 0.
Примерами Д-регуляторов является устройство впрыска топлива в двигателях, регуляторы для управляемых взрывных устройств и т.д. Необходимость использования Д-регуляторов возникает сравнительно редко, что объясняется тем , что взаимодействующие с регуляторами тиристорные и транзисторные преобразователи характеризуются высоким быстродействием и возникающие в них искажения напряжений и токов могут внести через диф. цепь возмущение в схему регулирования.
3. Интегральный закон управления.
Структурная схема САР с интегральным законом управления
РУ в виде динамического звена, построение этого РУ на операционном усилителе, а также операторное уравнение и передаточная функция будет иметь вид
![]()
Характерной особенностью И-регулятора является то, что его ![]() изменяется линейно в течение всего времени
, пока на его вход подается напряжение отличное от 0. При скачкообразном изменении
изменяется линейно в течение всего времени
, пока на его вход подается напряжение отличное от 0. При скачкообразном изменении
![]() ,
, ![]() начнет
линейно расти от 0. Через промежуток времени , равный постоянной
интегрирования t, напряжение на выходе станет равным MAX.
начнет
линейно расти от 0. Через промежуток времени , равный постоянной
интегрирования t, напряжение на выходе станет равным MAX.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

