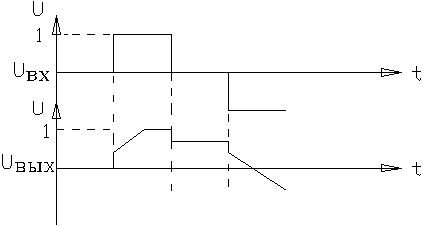
Временная характеристика РУ с интегральным законом управления
Если И-регулятор войдет в режим насыщения, то ![]() будет
сохранять MAX значение до тех пор пока знак входного сигнала не изменится на
противоположный.
будет
сохранять MAX значение до тех пор пока знак входного сигнала не изменится на
противоположный.
Уменьшение входного сигнала до 0 не вызовет снижение ![]() ,
а лишь прекратит его нарастание.
,
а лишь прекратит его нарастание.
Из временной характеристики следует , что И-регулятор обладает способностью
“запоминать” последнее значение ![]() , которое было
достигнуто перед сбросом в 0 управляющего сигнала.
, которое было
достигнуто перед сбросом в 0 управляющего сигнала.
Вследствие этого И-регуляторы могут обеспечить такое управление для САР, при котором будут отсутствовать зоны нечувствительности, а погрешность регулирования будет сведена практически к нулю.
4. Более совершенным по сравнению с
И-регулятором является инерционный регулятор.
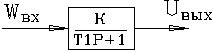
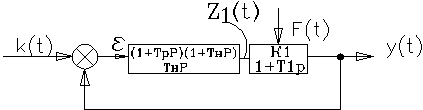
Структурная схема САР с инерционным регулятором
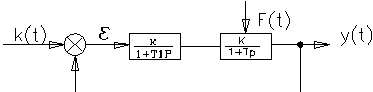
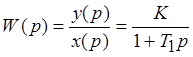
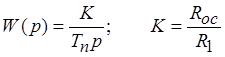
РУ в виде динамического звена, операторное управление и передаточная
функция будет иметь вид
![]()
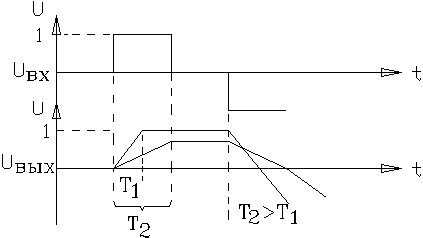
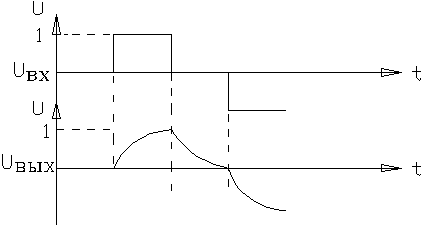
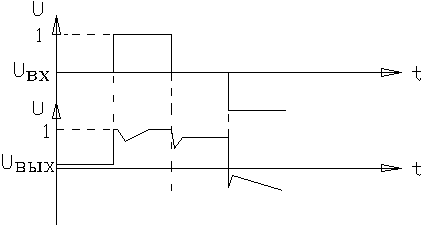
Характерной особенностью инерционного регулятора является изменение выходного
напряжения при скачкообразном изменении ![]() ,
согласно показательной функции.
,
согласно показательной функции.
Вследствие этого инерционные регуляторы обладают более высоким быстродействием, чем И-регуляторы.
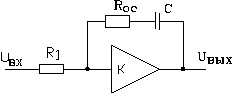
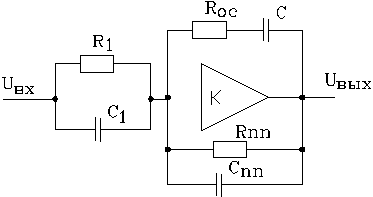
Инерционное РУ может быть реализовано на ОУ по следующей схеме
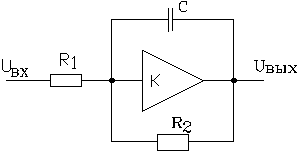
Временная характеристика РУ с инерционным законом управления
5.Пропорционально-интегрирующий регулятор
Относится к сложным регуляторам, совмещает в себе свойства П- и И-регуляторов и поэтому действует без статической ошибки.
![]()

Если в системе с ПИ-регулятором произойдет нарушение равновесия, то в работу
вступят его статические и астатические составляющие . При этом статическая
часть будет стремиться как бы догнать и остановить изменение регулируемой
величины. При достижении регулируемой величины первоначального значения
пропорциональная составляющая прекратит свое влияние, которое займет положение
отличное от заданного на величину статической ошибки. Действия астатической
составляющей на исполнительный механизм будет продолжаться и поэтому он займет
такое положение , при котором статические ошибки будут ликвидированы или равны
нулю . В ПИ-регуляторах пропорциональную функцию выполняет жесткая О.С. (![]() ) , а астатическую функцию - гибкая
обратная (изодромная). Действие этой О.C. проявляется только в переходном
режиме, а по его окончании исчезает . Из анализа выражений для коэффициента
усиления и постоянной времени следует, что для этих регуляторов регулировки
коэффициентов являются взаимо зависимыми.
) , а астатическую функцию - гибкая
обратная (изодромная). Действие этой О.C. проявляется только в переходном
режиме, а по его окончании исчезает . Из анализа выражений для коэффициента
усиления и постоянной времени следует, что для этих регуляторов регулировки
коэффициентов являются взаимо зависимыми.
6.Пропорционально-интегрально-дифференцирующий
регулятор (ПИД)
Представляет собой обобщение П-регулятора с И-регулятором и Д-регулятором
В общем виде структура системы с ПИД регулятором представляет собой последовательное соединение 2-х динамических звеньев, охваченных О.С.
ПИД регулятор в упрощенном виде может иметь следующую схему
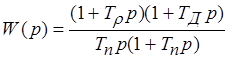
Уравнение передаточной функции для такого регулирующего устройства имеет вид:
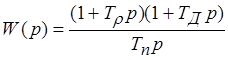
где
![]() - время опережения (постоянная времени
Д-регулятора)
- время опережения (постоянная времени
Д-регулятора)
![]() - время интегрирования (пост. времени
И-регулятора)
- время интегрирования (пост. времени
И-регулятора)
![]() - время удвоения (пост. времени
ПИ-регулятора)
- время удвоения (пост. времени
ПИ-регулятора)
Схема с конденсатором на входе восприимчива к помехам и влиянию источника питания управляющего сигнала, что ведет к необходимости учета постоянной времени дополнительной инерционности, применяемой для реальных схем таких регуляторов
![]()
Во многих случаях при управлении технологическими процессами необходимо изменять величины И., Д., П. - составляющих, либо на определенный промежуток времени отключать некоторые каналы формирования этих составляющих. Это требуется при организации систем с переменной структурой.
Для построения регулирующих устройств, отвечающих этим требованиям используют такие структурные схемы, в которых входной сигнал подается в 3 канала
А1- дифференциатор; А2- пропорционатор; А3- интегратор; А4- регулирующая
Общие уравнения такого регулирующего устройства:

Из анализа последнего выражения видно, что регулировка ПИД составляющих является независимой, может раздельно изменяться, а в необходимых случаях и отключается.
Исполнительным элементом в этой схеме является 3-х позиционный релейный элемент, в цепи О.C. используется О.Y. c независимой регулировкой глубины охвата прямого тракта регулирующего устройства.
В автоматическом режиме эта регулировка осуществляется контроллером по заранее составленной программе.
Регулировка составляющих ПИД осуществляется с помощью переменных многошаговых регуляторов имеющих механическую фиксацию.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.