Принцип автоматического управления
Известны принципы управления по отклонению, по возмущению, комбинированный и принцип адаптации. Выбор того или иного принципа построения автоматической системы зависит от его назначения, характера изменения задающего и возмущающего воздействия, возможности получения информации о параметрах системы, стабильности параметров управляемого объекта и т. д.
Принцип управления по отклонению предполагает, что управляющее воздействие в САУ вырабатывается с учетом информации об отклонении управляемой величины от заданного значения. Чтобы реализовать этот принцип, в управляющем устройстве должно происходить сравнение действительного значения управляемой величины с заданным (предписанным) и в зависимости от результатов полученного сравнения формироваться управляющее воздействие. Принцип управления по отклонению иллюстрирует систему управления скоростью двигателя постоянного тока приведенная на рис. ___
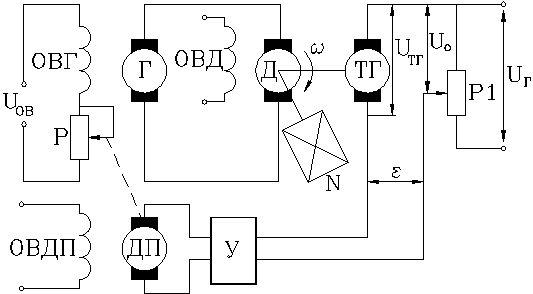
Рис. 1. Принципиальная схема управления скоростью вращения двигателя постоянного тока по замкнутому циклу:
Р - реостат; ОВГ - обмотка возбуждения генератора; Г - генератор; ОВД - обмотка возбуждения двигателя; Д - двигатель; ТГ - тахогенератор; У - усилитель; ДП - двигатель привода ползунка реостата.
Напряжение тахогенератора Uтг пропорциональное скорости вращения, все время сравнивается с постоянным значение U0 и разность между ними в виде сигнала рассогласования e=U0-Uтг через усилитель У подается на двигатель привода ДП. Любое изменение скорости вращения приведет к появлению сигнала на двигателе ДП, который переместит ползунок реостата Р в ту или другую сторону, в результате чего при уменьшении или увеличении скорости вращения двигателя Д по какой-либо причине (изменилась т. н. возмущающее воздействие) ток в обмотке возбуждения ОВГ генератора увеличивается или уменьшается, что приведет к соответствующему изменению напряжения генератора, а следовательно, к возвращению регулируемой величины к заданному значению.
Двигатель Д, как управляемый объект, испытывает на себе влияние различных возмущающих воздействий (изменение нагрузки на весу, напряжение питающей сети, скорости вращения первичного для генератора двигателя, температура окружающей среды и т. д.). Возмущающие воздействия вызовут отклонение управляемой величины - скорости вращения двигателя Д, но как сказано ранее - отклонение будет сведено к нулю или к заданным пределам. Это произойдет потому, что управляющее воздействие по его знаку и амплитуде формируется с учетом не только задающего воздействия, но управляемой величины, т. е. система работает на основе принципа управления по отклонению.
В общем случае структурная система реализующая принцип управления по отклонению будет иметь вид:
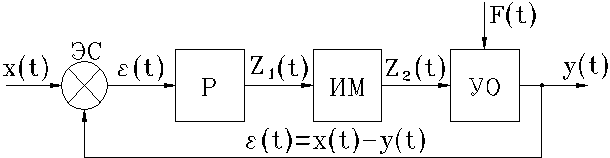
Рис. 2. Схема управления по отклонению.
Здесь отклонение управляемой величины от заданного значения вызывает изменение управляющего воздействия z2(t) стремящееся всегда уменьшить появившееся отклонение. Для получения разности e(t)=x(t)-y(t) в систему вводится элемент сравнения ЭС.
Регулятор функционирует независимо от того, по какой причине произошло изменение управляемой величины. Это является несомненным достоинством принципа управления по отклонению, в силу чего такие системы нашли широкое применение.
Принцип управления по возмущению (принцип компенсации возмущения). Основан на том, что управляющее воздействие в системе управления формируется в зависимости от результатов измерения возмущающего воздействия, оказывающего влияние на объект. Схема системы реализующей этот принцип показана на рис. ___
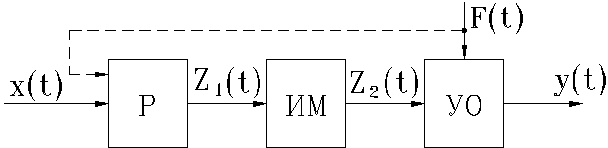
Рис. 3. Схема управления по возмущению.
В качестве примера рассмотрим работу генератора постоянного тока, одна обмотка возбуждения ОВ1 которого соединена с независимым источником постоянного тока, а вторая ОВ2 включена
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.