Министерство образования Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
![]() По
дисциплине
По
дисциплине
(наименование учебной дисциплины согласно учебному плану)
![]() Тема: ПИД
регулирование в SCADA-системе Intellution FIX 32
Тема: ПИД
регулирование в SCADA-системе Intellution FIX 32
Санкт-Петербург
2002 г.
Создадим обратную связь при помощи цепочки с блоком PID (цепочка 2). Для этого создадим параллельную цепочку описанной ранее цепочке (цепочке 1). Вторая цепочка состоит из следующих блоков:
|
 |
Рис.6
· Блок AI (7) свяжем с блоком AO (5) с помощью адресов. Адрес задается в базе данных в графе I\O Address.
· PID-блок (6) поддерживает баланс в замкнутом контуре, изменяет регулирующую переменную (аналоговый выход) в соответствие с отклонениями заданной точки некоторого текущего значения (аналоговый вход).
Вышестоящий блок AI и нижестоящий блок AO должны иметь те же инженерные единицы, что и PID-блок.
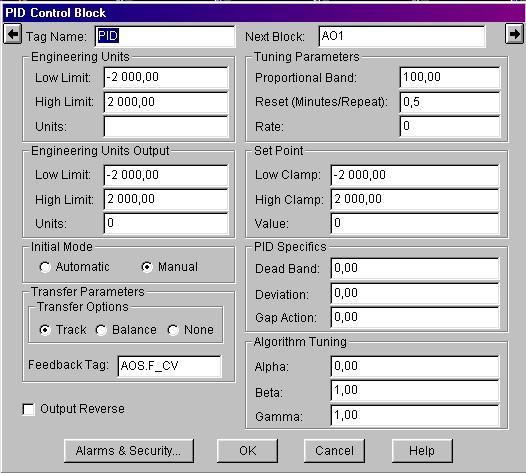
В блок ПИД-регулятора (PID_1) запишем значения для констант в графах Proportional (P) (пропорциональная часть), Reset (I) (интегральная часть), Rate (D) (дифференциальная часть). Оптимальные настройки надо подбирать небольшим уменьшением / увеличением этих значений, до достижения нужного качества регулирования.
Блок PID поддерживает баланс в замкнутом контуре аналогового сигнала в соответствии с отклонением текущего значения от некоторой заданной точки:
![]()
![]() ;
;
![]() -
обратная связь;
-
обратная связь;
![]() -
константа дифференцирования, мин;
-
константа дифференцирования, мин;
![]() -
константа интегрирования, мин/повтор;
-
константа интегрирования, мин/повтор;
![]() - фильтр производной (с увеличением α
производная (второе слагаемое уравнения) становится меньше);
- фильтр производной (с увеличением α
производная (второе слагаемое уравнения) становится меньше);
![]() - поправка к константе
пропорциональности;
- поправка к константе
пропорциональности;
![]() - поправка к константе
дифференцирующего действия.
- поправка к константе
дифференцирующего действия.
 |
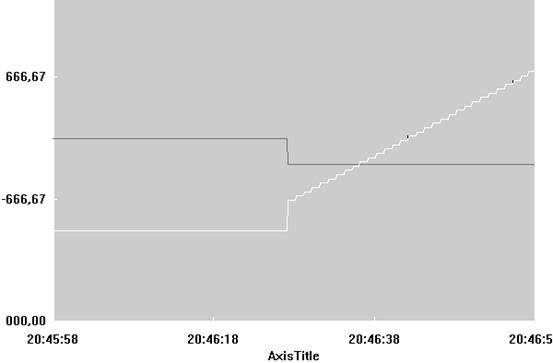
Получаем процесс, имеющий вид:
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.