Рис.11
1. В начальный момент времени срабатывает пропорциональная часть регулятора – резкий скачок, перпендикулярный оси абсцисс, что видно из рисунка. Коэффициент регулирования рассчитывается по формуле:
![]() , где
, где
![]() ;
;
![]() ;
;
![]() .
.
Кр – коэффициент пропорциональной части регулятора;
Δumax, Δymax – диапазоны инженерных единиц;
РВ – графа в блоке ПИД-регулятора, 1- 10000% - зона пропорциональности (для нашего примера РВ = 100).
Исходя из формулы, Кр для данного случая равен 1 (Δumax = 4000, Δymax = 4000, см. рис. 8).
2. После пропорциональной части начинает работать интегральная часть ПИД-регулятора (прямая, идущая под углом α к оси абсцисс).
![]() , (1)
, (1)
α – угол наклона прямой к оси абсцисс;
Ти – константа интегрирования (мин/повтор): величина, записанная в графе Reset блока ПИД-регулятора (для данного рисунка Ти = 0,1).
Определим tgα теоретически и экспериментально:
1. Теоретически с помощью формулы (1):
![]() ;
;
2. Экспериментально – по графику рис. 11:
![]() .
.
![]() - время, откладываемое по оси
абсцисс, мин.
- время, откладываемое по оси
абсцисс, мин.
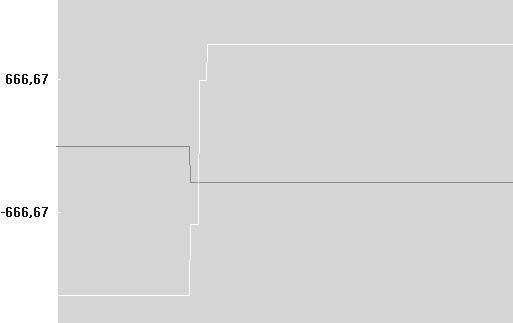 |
Рис.12
Данный рисунок показывает действие пропорциональной и дифференциальной частей ПИД-регулятора на внешнее возмущающее воздействие.
![]() Таким образом, схема программы имеет вид:
Таким образом, схема программы имеет вид:![]()
![]()
|
|
|
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.