Министерство образования РФ
Новосибирский Государственный Технический Университет
Кафедра Автоматики
Лабораторная работа №2
Положения равновесия и устойчивость нелинейных систем
Факультет: АВТ Проверила: Шпилевая О.Я.
Группа: АА-124
Бригада: 2
Выполнили: Орсоев А.В.,
Перевалов Д.Ц.,
Гатенюк А.О.
Новосибирск, 2004
Цель работы:
Исследовать устойчивость систем с однозначными и неоднозначными нелинейными характеристиками относительно положений равновесия.
Исходные данные:
Дифференциальные уравнения:
u=4, a0=0.41, a1=1
![]()
 или
или 
X[0;0]T
![]()
В окрестности данной точки система неустойчива, поскольку не все коэффициенты при p положительны.
X[-9;-9]T
![]()
В окрестности точки X[-9;-9] система устойчива, поскольку все коэффициенты положительны.
![]()
 или
или 
X[0,42;0,42]T
![]()
В окрестности данной точки система неустойчива, поскольку не все коэффициенты при p положительны.
X[-9,42;-9,42]T
![]()
В окрестности точки X[-9,42;-9,42] система устойчива, поскольку все коэффициенты положительны.
Рис.1. Схема моделирования исследуемого объекта
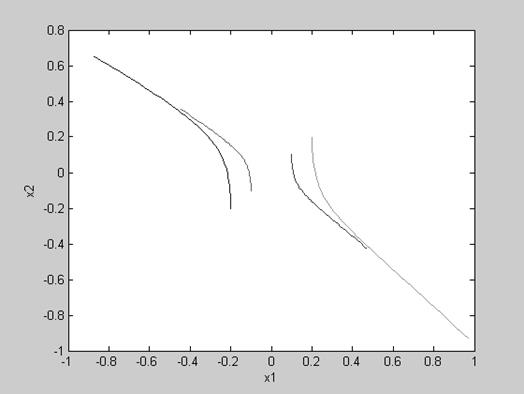
Рис.2. Фазовый портрет системы с различными начальными значениями, близкими к X=[0;0]T, при U=0.
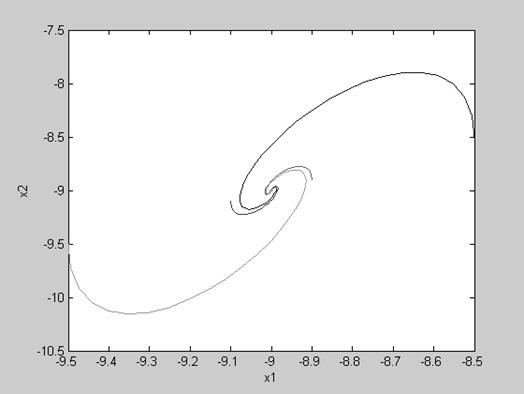
Рис.3. Фазовый портрет системы с различными начальными значениями, близкими к
X=[-9;-9]T, при U=0.
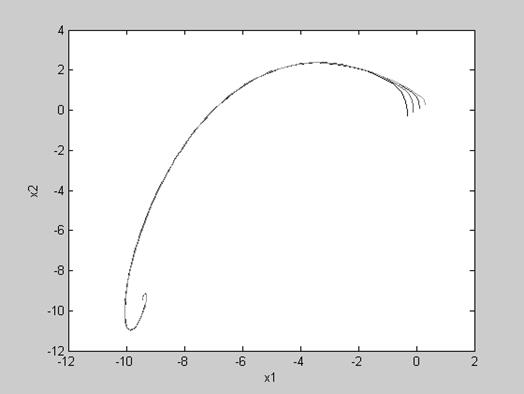
Рис.4. Фазовый портрет системы с различными начальными значениями, близкими к X=[0;0]T, при U=4.
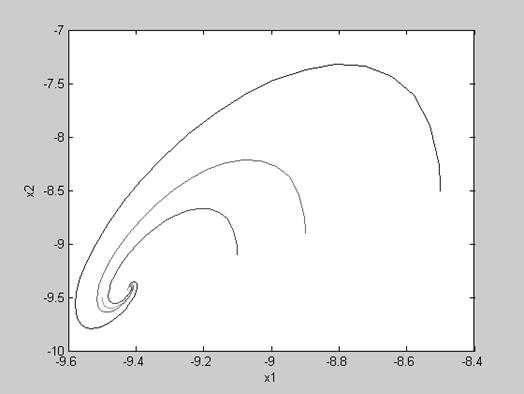
Рис.5. Фазовый портрет системы с различными начальными значениями, близкими к
X=[-9;-9]T, при U=4.
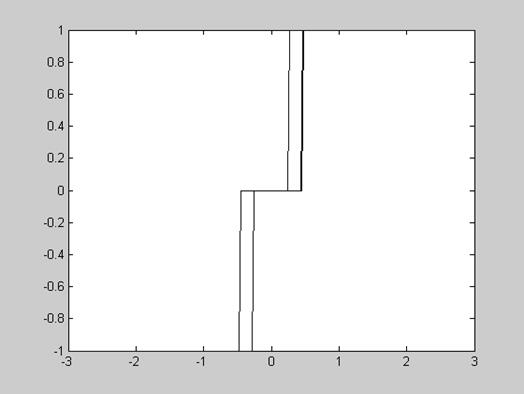
Рис.6. Характеристика релейного элемента f(z) (сигнал z=3sin(t) выводится по оси абсцисс, f – по оси ординат).
Рис.7. Модель системы с нелинейной характеристикой.
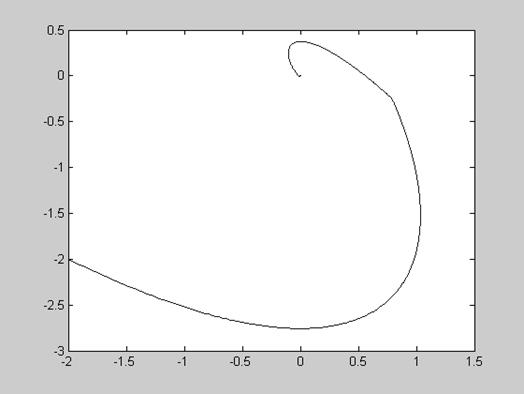
Рис.8. Фазовый портрет при табличных значениях параметров системы, U=0 и ненулевых начальных условиях (y(0)=y’(0)=-2)
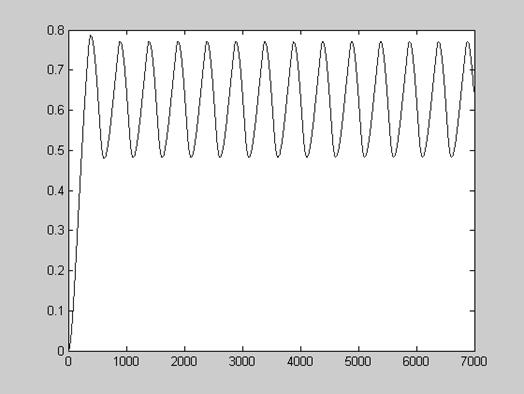
Рис.9. Переходная характеристика системы (U=1(t), y(0)=y’(0)=0).
Время моделирования – 70
Выводы:
Фазовый портрет – это совокупность фазовых траекторий, заполняющая всю фазовую плоскость.
В равновесных точках фазовые траектории не пересекаются друг с другом.
Фазовые траектории сходятся к особым точкам, если в них система устойчива, или выходят из них.
Нелинейные системы могут иметь несколько положений равновесия, которые могут быть устойчивыми или неустойчивыми. Точки равновесия в нелинейных системах могут отсутствовать.
Устойчивость положения равновесия нелинейной системы удобнее всего определять по ее фазовому портрету или по фазовой траектории.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.