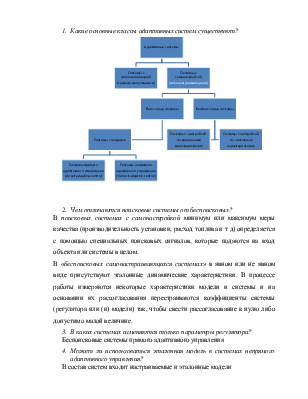
1. Какие основные классы адаптивных систем существуют?
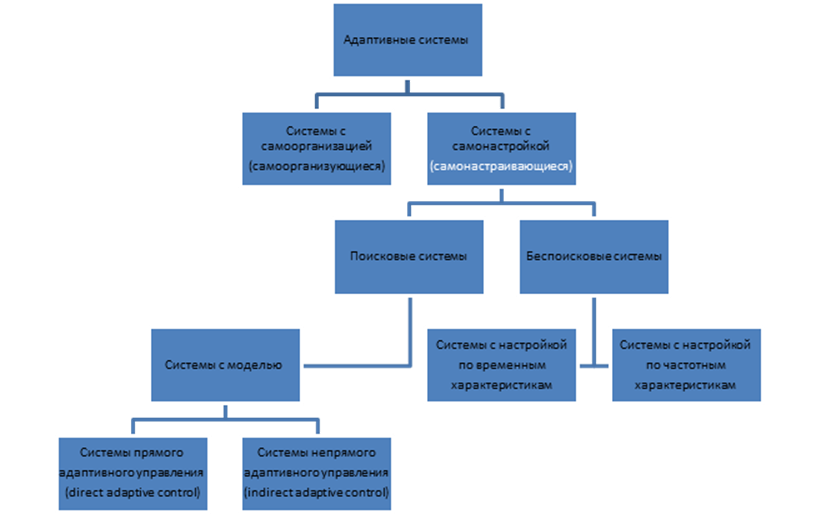
2. Чем отличаются поисковые системы от беспоисковых?
В поисковых системах с самонастройкой минимум или максимум меры качества (производительность установки, расход топлива и т д) определяется с помощью специальных поисковых сигналов, которые подаются на вход объекта или системы в целом.
В «беспоисковых самонастраивающихся системах» в явном или не явном виде присутствуют эталонные динамические характеристики. В процессе работы измеряются некоторые характеристики модели и системы и на основании их рассогласования перестраиваются коэффициенты системы (регулятора или (и) модели) так, чтобы свести рассогласование к нулю либо допустимо малой величине.
3. В каких системах изменяются только параметры регулятора?
Беспоисковые системы прямого адаптивного управления
4. Может ли использоваться эталонная модель в системах непрямого адаптивного управления?
В состав систем входят настраиваемые и эталонные модели
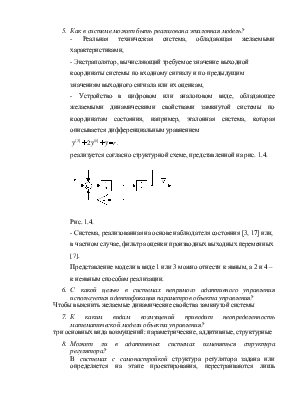
5. Как в системе может быть реализована эталонная модель?
- Реальная техническая система, обладающая желаемыми характеристиками,
- Экстраполятор, вычисляющий требуемое значение выходной координаты системы по входному сигналу и по предыдущим значениям выходного сигнала или их оценкам,
- Устройство в цифровом или аналоговом виде, обладающее желаемыми динамическими свойствами замкнутой системы по координатам состояния, например, эталонная система, которая описывается дифференциальным уравнением
![]() ,
,
реализуется согласно структурной схеме, представленной на рис. 1.4.
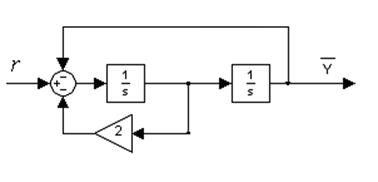
Рис. 1.4.
- Система, реализованная на основе наблюдателя состояния [3, 17] или, в частном случае, фильтра оценки производных выходных переменных [7].
Представление модели в виде 1 или 3 можно отнести к явным, а 2 и 4 – к неявным способам реализации.
6. С какой целью в системах непрямого адаптивного управления используется идентификация параметров объекта управления?
Чтобы выяснить желаемые динамические свойства замкнутой системы
7. К каким видам возмущений приводит неопределенность математической модели объекта управления?
три основных вида возмущений: параметрические, аддитивные, структурные
8. Может ли в адаптивных системах изменяться структура регулятора?
В системах с самонастройкой структура регулятора задана или определяется на этапе проектирования, перестраиваются лишь коэффициенты управляющего устройства для достижения цели управления.
9. В чем недостатки априорной информации?
Реально приходится иметь дело с неполной априорной информацией. Это связано с присутствием помех, возмущений, с идеализацией свойств реальных систем при описании динамических характеристик. Степень неполноты может быть различной. Существенная особенность любых априорных сведений состоит в том, что, будучи получены заранее, они затем не только не обновляются, но вследствие различных изменений теряют свою достоверность.
10.Может ли внешнее возмущение иметь неограниченную амплитуду?
11.Изменение момента инерции двигателя относится к какому виду возмущений? А изменение момента сопротивления?
12. С помощью каких устройств можно получать текущую информацию о работе системы?
13.В чем заключается особенность структуры адаптивных систем по сравнению с системами, рассчитанными методами классической теории управления?
14.Что называется основным контуром?
Контур, формирующий управление
15.В чем заключается функция адаптора?
Устройство, реализующее алгоритм изменения коэффициентов регулятора или его структуры
16.Какими методами могут быть синтезированы регулятор, адаптор?
-метод эталонного уравнения (или метод инвариантности). Уравнение закона управления получается из равенства правых частей уравнений эталонной модели и модели объекта управления, разрешенных относительно старших производных выходных переменных или координат состояния;
-модальный метод; для определения закона управления используется желаемое расположение собственных чисел матрицы системы;
-методы оптимального управления. Закон управления получается в результате решения задачи оптимизации по управляющему воздействию некоторого обобщённого показателя качества;
-метод сингулярных возмущений; синтез закона управления выполняется по упрощенной модели системы, которая получается в результате выделения подсистем быстрых и медленных процессов. Закон управления определяется по модели, описывающей подсистему медленных движений.
17.С какой целью используются целевые функции?
Они могут формулироваться как допустимый минимум некоторой меры отклонения системы от желаемого или предписанного состояния или минимум энергетических затрат на отработку возмущающего воздействия и т.д.
18.Можно ли в качестве целевой функции использовать квадратичную форму от ошибки работы системы?
Да
19.Чем отличается целевая функция от целевого критерия?
Критерий качества часто называют целевым критерием, а функционал качества Q(.) – целевым функционалом.
20.Структуру какого устройства описывает алгоритм адаптации?
21.Чем отличается идеальный закон управления от реального?
Идеальный закон управления нереализуем (коэффициенты неизвестны). Реальный описывает регулятор вместо неизвестных параметров объекта.
22.Как
называется выражение  , с какой целью может быть использовано при расчете
системы?
, с какой целью может быть использовано при расчете
системы?
Описывает функцию цели и одновременно является интегратором показателя качества (взвешенный модуль ошибки)
23.Увеличение коэффициента передачи разомкнутой системы уменьшает или увеличивает зависимость свойств системы от изменения параметров?
Чем больше коэффициент передачи, тем меньше зависимость.
24.Изменение коэффициента по алгоритму  обеспечивает спуск в локальный минимум или
максимум функции
обеспечивает спуск в локальный минимум или
максимум функции ![]() ?
?
Гамма влияет на скорость спуска в локальный минимум
25.Какой вид целевой функции используется при расчете системы вторым методом Ляпунова и почему?
Локальная целевая функция, т.к. выражения являются квадратичными формами, поэтому их можно использовать как функции Ляпунова.
26.Каким методом получен алгоритм адаптации вида ![]() ?
?
- Введена ошибка системы по выходным переменным (e).
-Введена обобщенная ошибка (σ).
-Выбрана функция цели (Q).
-Введен оператор параметрического рассогласования (Δ(p)).
-Определен вид «идеального» закона управления.
-Выполнен переход к реальному закону управления.
-Определена связь между обобщенной ошибкой и ошибкой по выходной переменной. Доказано свойство e → 0 при t → ∞, если σ→ 0.
-Определено уравнений обобщенного настраиваемого объекта в отклонениях.
-На основе градиентной процедуры определен вид алгоритма адаптации.
27.Какой алгоритм адаптации обладает лучшим быстродействием интегральный или пропорционально-интегральный?
Пропорционально-интегральный
28.Почему идеальный закон управления нереализуем?
Неизвестны коэффициенты
29.Как называется алгоритм вида  ?
?
Алгоритм скоростного градиента
30.В расчете каких систем используется обобщенная ошибка и почему? Как называется метод синтеза?
Адаптивных систем для определения целевой функции.
31.Какая форма АСГ имеет вид  ?
?
Конечная дифференциальная форма АСГ
32.Какое устройство описывает уравнение ![]() ?
?
Основной контур. Реальный закон управления.
33. С помощью какой формы АСГ можно получить интегральный алгоритм адаптации?
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.