Министерство Образования РФ
Новосибирский государственный технический университет
Кафедра Автоматики
Лабораторная работа №2
система с настройкой коэффициентов регулятора на основе алгоритма скоростного градиента
Группа: АА-06
Студенты: Рампилова С.Б. Преподаватель: Мисюркеев А.И. Шпилевая О.Я.
Кошкина Е.В.
Отметка о защите:
г. Новосибирск
2004 г
Цель работы: исследование свойств системы стабилизации, в которой коэффициенты регулятора изменяются по пропорционально-интегральному алгоритму скоростного градиента в дифференциальной форме.
|
N |
|
|
b |
|
|
|
5 |
-0,1 |
-0,5 |
0,1 |
30 |
10 |
1.
Определить элементы матриц ![]() ,
,![]() ,
,![]() по заданным требованиям к качеству
процессов (см. Таблицу 1).
по заданным требованиям к качеству
процессов (см. Таблицу 1).
 ,
,  ,
,  , μ = 2.62,
, μ = 2.62,
μ = tg(φ), φ = 69 0,
p1= -1 , p2= - 7 à a0м = 7, a1м = 8, bм = 7.
2. Вычислить элементы матриц H как решение уравнения Ляпунова при
 .
.
Записать уравнения алгоритмов адаптации (2.20)-(2.22) с вычисленными значениями коэффициентов.
3. Собрать схему эталонной модели
на интегрирующих элементах. Снять переходную характеристику ![]() . Определить показатели качества.
. Определить показатели качества.
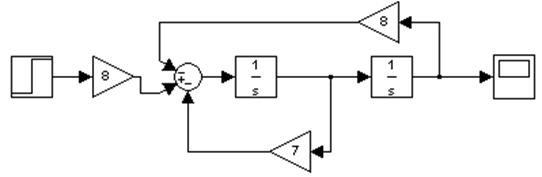
Рисунок 1. Структурная схема эталонной модели объекта
Рисунок 2.
Переходная характеристика эталонной модели: ![]() s%
= 0%,
s%
= 0%, ![]() = 6 с.
= 6 с.
4. Собрать схему адаптивной системы.
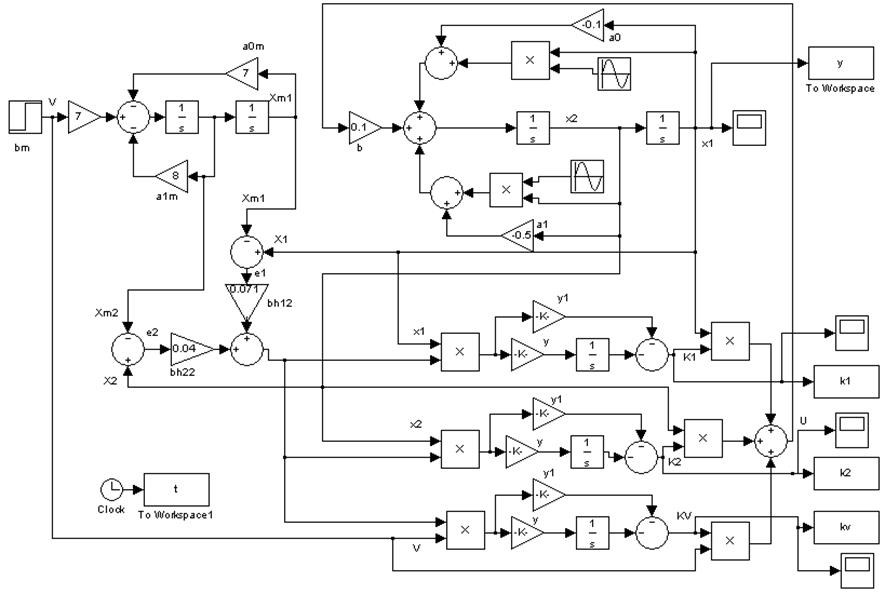
Рисунок 3. Схема адаптивной системы
5. Снять переходную
характеристику системы (y(t)) и процессы на выходе адаптера (![]() ) при r(t)=1(t), нулевых начальных
условиях на интегрирующих элементах, g
=g1=1. Определить
показатели качества (s%,
) при r(t)=1(t), нулевых начальных
условиях на интегрирующих элементах, g
=g1=1. Определить
показатели качества (s%, ![]() ,
, ![]() -время сходимости процессов в адаптере).
-время сходимости процессов в адаптере).
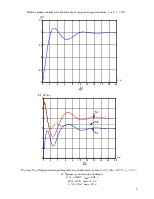
Рисунок 4.
Переходная характеристика адаптивной системы y(t): s% = 5%, ![]() = 23 с.
= 23 с.
Процессы на выходе адаптера:
k1(t)= 0.192, tпаk1= 30,4 с;
k2(t) =0.0334, tпаk2= 16,5 c;
kV(t) = 0.809, tпаkv= 15,33 с.
6. Изменить значения
коэффициентов (![]() =1,
=1, ![]() =10 и
=10 и ![]() =10,
=10, ![]() 1=
10) сравнить переходные характеристики и процессы в адаптере с результатами
п.3.5 по показателям качества.
1=
10) сравнить переходные характеристики и процессы в адаптере с результатами
п.3.5 по показателям качества.
А) ![]() =1,
=1, ![]() =10
=10
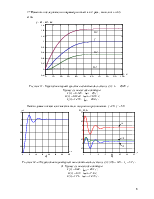
Рисунок 5. Переходная характеристика адаптивной системы y(t): ![]() s% = 0%,
s% = 0%, ![]() = 33 с.
= 33 с.
Процессы на выходе адаптера:
k1(t) = 0.332, tпаk1= 25,4 с;
k2(t) = 0.03207, tпаk2= 12,6 c;
kV(t) =0.668, tпаkv= 17,2 с.
б) ![]() =10,
=10, ![]() 1= 10
1= 10
Рисунок 6. Переходная характеристика адаптивной системы y(t): s%
= 40%, ![]() = 37,5 с.
= 37,5 с.
Процессы на выходе адаптера:
k1(t) =-0.64, tпаk1= 49,56 с;
k2(t) =0.1126, tпаk2= 27,82 c;
kV(t) =1.64, tпаkv= 37,6 с.
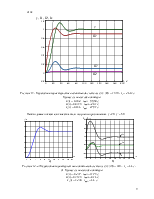
Необходимые показатели качества
были получены при значениях ![]() =10,
=10, ![]() 1= 60
1= 60
а) б)
Рисунок 7. а) Переходная
характеристика адаптивной системы y(t): s% = 9%, ![]() = 6,2 с.
= 6,2 с.
б) Процессы на выходе адаптера:
k1(t) =0,13, tпаk1= 16,3 с;
k2(t) =0,177, tпаk2= 5,9 c;
kV(t) =0,867, tпаkv= 9,89 с.
7. Изменить начальные условия в
объекте (![]() ,
,![]() ), получить вид y(t),
), получить вид y(t), ![]() ,
, ![]() ,
,![]() .
Моделирование провести при g=
.
Моделирование провести при g=![]() =1,
=1, ![]() =1,
=1, ![]() =10.Сравнить с результатами п.3.5.
=10.Сравнить с результатами п.3.5.
а) g
=![]() =1
=1
Рисунок
8. Переходная характеристика адаптивной системы y(t): s% = 9,5%, ![]() = 41,4
с.
= 41,4
с.
Процессы на выходе адаптера:
k1(t) = 0.283, tпаk1= 46,5 с;
k2(t) = 0.0664, tпаk2= 20,6 c;
kV(t) =0.717, tпаkv= 32,2 с.
б)![]() =1,
=1, ![]() =10
=10
Рисунок 9. Переходная
характеристика адаптивной системы y(t): ![]() = 38,6 с.
= 38,6 с.
Процессы на выходе адаптера:
k1(t) = 0.376, tпаk1= 29,1 с;
k2(t) =0.0585, tпаk2= 18,8 c;
kV(t) =0.623, tпаkv= 14,5 с.
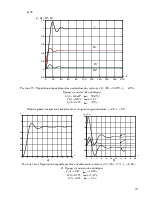
Необходимые показатели качества
были получены при значениях ![]() =15,
=15, ![]() 1= 50
1= 50
Рисунок
10. а) Переходная характеристика адаптивной системы y(t): s% = 18,5%, ![]() = 9,3 с.
= 9,3 с.
б) Процессы на выходе адаптера:
k1(t) =-0,025, tпаk1= 8,08 с;
k2(t) =0,35, tпаk2= 8,5 c;
kV(t) =1,02, tпаkv= 16 с.
7.* Изменить последовательно параметры объекта в 2 раза, выполнить п.3.5.
a) 2a0
Рисунок
11. Переходная характеристика адаптивной системы y(t): ![]() = 48.45 с.
= 48.45 с.
Процессы на выходе адаптера:
k1(t) = 0.545, tпаk1= 48 с;
k2(t) =0.0344, tпаk2= 30.95 c;
kV(t) =1.455, tпаkv= 39.3 с.
Необходимые показатели качества
были получены при значениях ![]() =20,
=20, ![]() 1= 50
1= 50
Рисунок
12. а) Переходная характеристика адаптивной системы y(t): s% = 12%, ![]() = 9,7 с.
= 9,7 с.
б) Процессы на выходе адаптера:
k1(t) =0,22, tпаk1= 20,1 с;
k2(t) =0,33, tпаk2= 7,6 c;
kV(t) =1,78, tпаkv= 12,35 с.
б) 2a1
Рисунок 13. Переходная
характеристика адаптивной системы y(t): s% = 15,5%,![]() = 48.83
с.
= 48.83
с.
Процессы на выходе адаптера:
k1(t) = 0.102, tпаk1= 88,53 с;
k2(t) =0.0335, tпаk2= 20,1 c;
kV(t) =0,898, tпаkv= 37,51 с.
Необходимые показатели качества
были получены при значениях ![]() =20,
=20, ![]() 1= 50
1= 50
Рисунок
14. а) Переходная характеристика адаптивной системы y(t): s% = 16%, ![]() = 8,8 с.
= 8,8 с.
б) Процессы на выходе адаптера:
k1(t) =-0,437, tпаk1=11,75 с;
k2(t) =0,3935, tпаk2= 6,18 c;
kV(t) =1,436, tпаkv= 8,8 с.
в) 2b
Рисунок 15. Переходная
характеристика адаптивной системы y(t): s% = 16,75%,![]() = 32,8
с.
= 32,8
с.
Процессы на выходе адаптера:
k1(t) = 0.0447, tпаk1= 50,45 с;
k2(t) =0.031, tпаk2= 9,2 c;
kV(t) =0,455, tпаkv= 25,8 с.
Необходимые показатели качества
были получены при значениях ![]() =20,
=20, ![]() 1= 50
1= 50
Рисунок
16. а) Переходная характеристика адаптивной системы y(t): s% = 13%, ![]() = 6,65
с.
= 6,65
с.
б) Процессы на выходе адаптера:
k1(t) =-0,21, tпаk1=12,05 с;
k2(t) =0,171, tпаk2= 5,87 c;
kV(t) =0,71, tпаkv= 9,5 с.
8.* Изменить модель объекта
управления: ![]() ,
, ![]() (рисунок
1.2). Провести моделирование при нулевых начальных условиях и различных
значениях
(рисунок
1.2). Провести моделирование при нулевых начальных условиях и различных
значениях ![]() : а)
: а) ![]() =1,
=1, ![]() =1, б)
=1, б) ![]() =1,
=1, ![]() =10, в)
=10, в) ![]() =10,
=10, ![]() =1. Для улучшения процессов в системе
изменить значения
=1. Для улучшения процессов в системе
изменить значения ![]() ,
, ![]() .
Сравнить с результатами п.3.5.
.
Сравнить с результатами п.3.5.
а) ![]() =1,
=1, ![]() =1
=1
Рисунок 17. Переходная характеристика адаптивной системы y(t) и процессы на выходе адаптера: k1(t), k2(t), kV(t).
Требуемые показатели качества
были получены при значениях ![]() =900,
=900, ![]() 1= 900
1= 900
Рисунок
18. а) Переходная характеристика адаптивной системы y(t): ![]() = 5,2 с.
= 5,2 с.
б) Процессы на выходе адаптера: k1(t), k2(t), kV(t).
б) ![]() =1,
=1, ![]() =10
=10
Требуемые показатели качества
были получены при значениях ![]() =20,
=20, ![]() 1= 60
1= 60
Рисунок
19. а) Переходная характеристика адаптивной системы y(t): s% = 17,5%, ![]() = 8,9 с.
= 8,9 с.
б) Процессы на выходе адаптера: k1(t), k2(t), kV(t).
в) ![]() =10,
=10, ![]() =1
=1
Требуемые показатели качества
были получены при значениях ![]() =8500,
=8500, ![]() 1= 9000
1= 9000
Рисунок
20. а) Переходная характеристика адаптивной системы y(t): ![]() = 5,2 с.
= 5,2 с.
б) Процессы на выходе адаптера: k1(t), k2(t), kV(t).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.