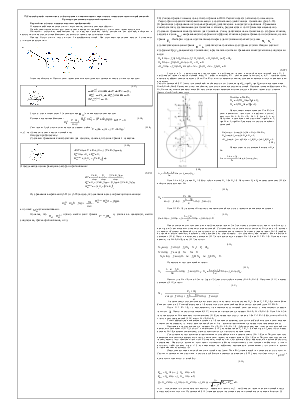
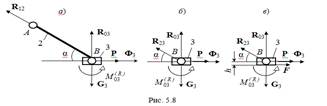
17) Силовой расчёт механизмов с учётом трения в кинематических парах методом последовательных приближений. Пример: кривошипно- ползунный механизмПервый метод (метод последовательных приближений). В первом приближении связи считают идеальными, силами трения пренебрегают. По найденным реакциям находят силы трения и повторяют силовой расчет, считая силы трения известными. Вычисляют следующие приближения до тех пор, пока разница между значениями сил реакций, найденных в последующем и предыдущем приближениях, не окажется меньше допустимого значения. Пример. Будем считать массу шатуна 2 пренебрежимо малой. При сделанном допущении ползун 3 становится статически определимым.
Первое приближение. Полагая силы трения равными нулю, запишем уравнения кинетостатики для ползуна:
Здесь α –
угол наклона звена 2 (и силы реакции Реакции в первом
приближении: Сила трения F,
действующую на ползун со стороны стойки: где f – коэффициент трения в поступательной паре. Второе приближение. Составим уравнения кинетостатики для ползуна, полагая, что сила трения Fизвестна.
Отсюда найдем силы реакции во втором приближении:
Из сравнения выражений (5.21) и (5.18) видно, что значения всех сил реакций изменились:
а момент Полагая, что |
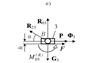
20) Силовой расчет механизмов с учетом трения в ВКП. Расчет плоского кулачного механизма. Рассмотрим плоский кулачковый механизм с
поступательно движущимся толкателем (рис. 5.12). Ограничимся определением
компонент реакций, действующих в плоскости движения. Уравнения кинетостатики,
составленные для толкателя и кулачка, разделяются и могут решаться
независимо. Составим уравнения кинетостатики для толкателя. Силы, действующие
на толкатель со стороны кулачка, сводятся к силе
(5.27) Здесь α и f1 – соответственно угол давления и коэффициент трения в высшей кинематической паре К, f2 – коэффициент трения в поступательной паре, P2 – рабочая нагрузка, Ф2 – сила инерции толкателя, а, h, L – геометрические параметры, обозначенные на рисунке. Силы P2 и Ф2 считаются положительными, если они направлены так, как они показаны на рисунке. Система уравнений (5.27) является нелинейной: в ней присутствуют функции signN12, signNA, signNB, имеющие разрывы при N12=0, NA=0, NB=0. Уравнения станут линейными, если задать знаки неизвестных реакций. Предварительно выберем знаки N12, NA, NB такими, какими они получились бы в рассматриваемом положении механизма, если бы силы трения отсутствовали. Полагая f1 = 0, f2 = 0, получаем:
Если L > a + f2h , то при N12 > 0 будет действительно NA < 0 и NB > 0. Подставим NA и NB в первое уравнение (5.28) и найдем из него реакцию N12:
Если Р2 + Ф2 > 0, то реакция N12 останется положительной в системе с трением при выполнении условия При увеличении угла давления α или коэффициентов трения f1 и f2 значение σ уменьшается; при cosα = f1sin α, т.е. при ctg α = f1 она наверняка становится отрицательной. С уменьшением σ увеличивается значение |N12|, при σ = 0 реакция становится «бесконечно большой», что свидетельствует о заклинивании механизма. Значения σ, при которых N12 < 0, вообще не должны рассматриваться, поскольку такое решение не удовлетворяет тем условиям, при которых были получены уравнения (5.28). Могут ли исходные уравнения (5.27) иметь решение, в котором N12 < 0 при Р2 + Ф2 > 0? Если при этом принять, что NA>0, NB<0, то из (5.27) получаем
Из последних двух уравнений находим:
Полагая, что N12 < 0, sin α > f1cos α (сtg α < f1), получаем, действительно, NA > 0, NB < 0. Подставив (5.33) в первое уравнение (5.32), имеем:
Это уравнение, а следовательно, и исходная система не может иметь |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


 (5.21)
(5.21)